Paso 6: El brazo
Hay 24 grupos musculares que contribuyen para el movimiento y la estabilidad del hombro. De éstas, 17 son en alguna manera unida a la lámina de hombro, que es un hueso libre flotante que contrapesa y proporciona un soporte para la rotación del brazo en la toma de bola. Hay sólo un hueso tradicional conjunto conectando el hombro al resto del cuerpo (desde la clavícula al esternón). De lo contrario, el hombro es en gran parte sujeta por los tendones, ligamentos, cartílago y músculo. También cabe destacar, muchos de estos músculos son músculos largos que se extienden a lo largo de la espalda y el pecho.
Para traducir en términos robóticas habría necesitado una mayor estructura de apoyo de las pequeñas articulaciones modulares que pretende construir. Además, incluso si tuviera que simplificar la musculatura del hombro para incluir solamente los músculos necesarios para movimiento enérgico, todavía habría necesitaba un número importante de músculos artificiales. Es mi conclusión que como punto de partida hacia una articulación humana generalizada, el hombro es menos que ideal debido a su singularidad y complejidad de la estructura.
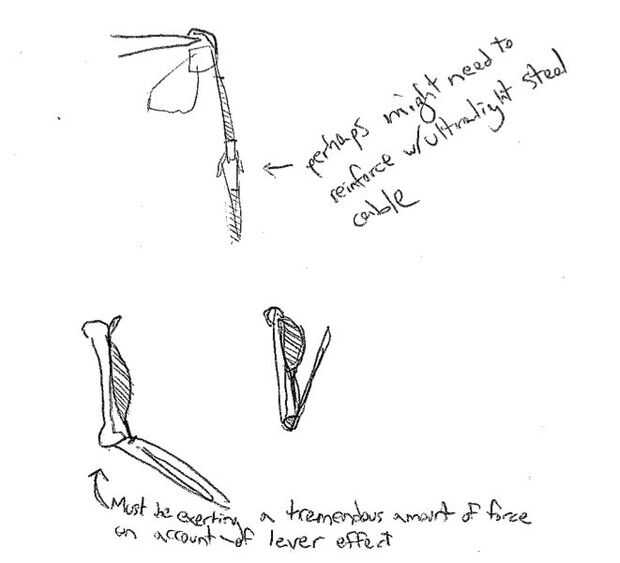
Afortunadamente, no mucho más abajo del brazo, se encuentra el codo. El codo es un empalme de la bisagra de libro de texto. Tiene también una vinculación relativamente simple de músculos, que se expanden y contraen la articulación a lo largo de un arco de 140 grados. La otra característica notable de esta articulación de bisagra es que no sólo refleja un número de otras articulaciones humanas incluyendo la rodilla y las articulaciones del dedo, sino de que también refleja las articulaciones de bisagra en un anfitrión de otras especies. Estos incluyen, pero hay medios limitados a lagartos, perros, caballos, tortugas y elefantes. En términos de un mecanismo que sería clave para la locomoción como generalizado, el empalme de la bisagra me pareció un buen punto de partida.
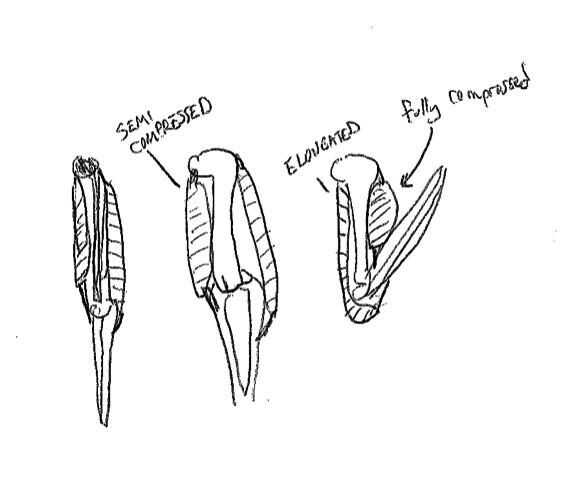
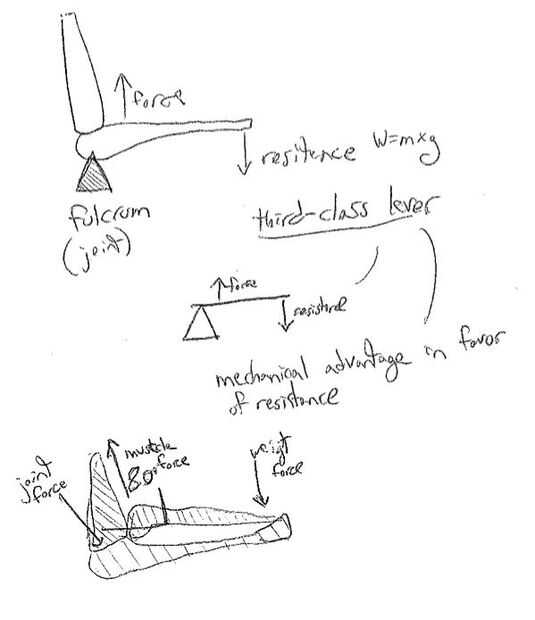
La misma es relativamente básico. Consta de dos huesos separados por cartílago y ligan por cuatro ligamentos. Los músculos entonces fijan a los huesos con tendones para crear una palanca de tercera clase. Contratación y soltando los músculos antebrazo levanta y baja. Más allá de eso, no hay mucho más para entender en el camino de funcionalidad básica. Es un muy simple modelo biomecánico, que es una forma ideal para explorar en cuanto a la robótica.
En caso de que no está familiarizado con su propio codo, mira bien:
 (impresión 3D)")












")