Paso 24: Extremidad robótica

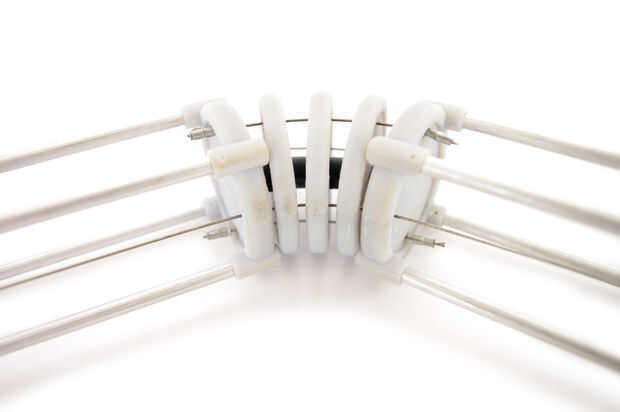



La placa se llevó a cabo en lugar por la alternancia de los collares del eje. Dos collares de eje fueron colocados en barras diagonales delante de la placa del motor y dos fueron colocados en las barras diagonales opuestas detrás de la placa. La idea era que estos impedirían la placa de deslizamiento hacia delante o hacia atrás. Más tarde supe que poner todos los collares de eje cuatro frente a la placa del motor era una mejor idea. La placa nunca se desliza hacia atrás, y colocarlos todos en frente evita que la placa de deformación (resulta que la placa no como sólido como esperaba cuando pone bajo tensión).
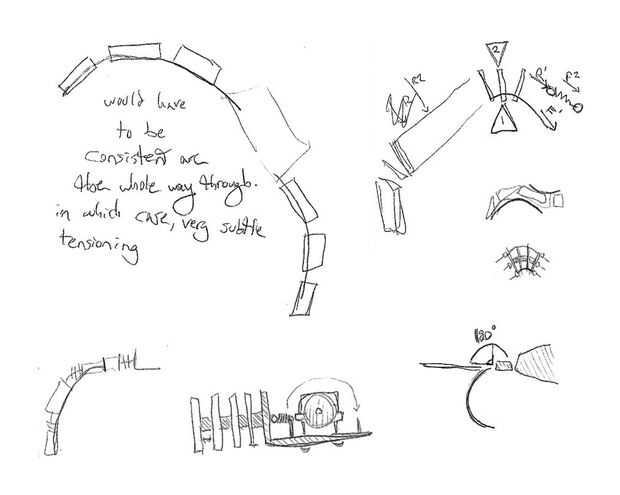
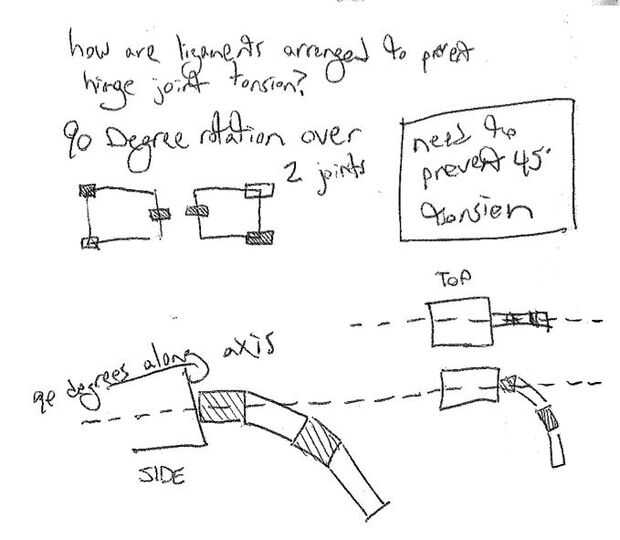
Aunque el plan inicial era utilizar la extremidad para empujar contra la tabla, rápidamente descubrí que este plan estaba viciado. Resultó que las articulaciones de bisagra impresas tiene 45 grados de torsión, aun cuando limitado por los cables de acero. Esto significa que un segmento con dos articulaciones tiene un completo 90 grados de "twist". Como tal, cualquier segmento con más de una de las articulaciones (como actualmente se diseña cada extremidad) va rápidamente hacia un lado y pierda estabilidad.
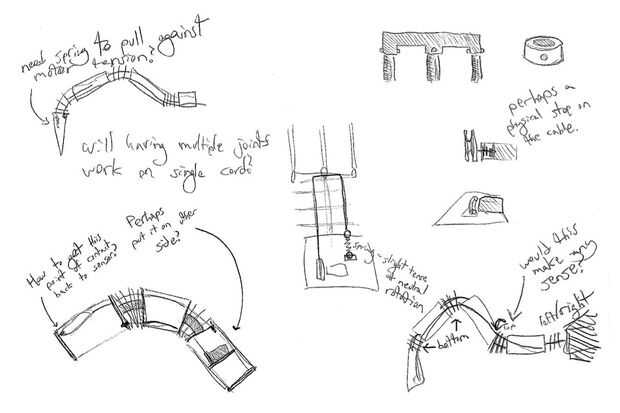
Ya que empujando contra la tabla dio lugar a la extremidad girando 90 grados, decidí probar colgando fuera del borde de la mesa. De esta manera, puedo observar cómo la articulación se doblaría bajo tensión sin preocuparse de que torcer.
En este ejemplo, he dado vuelta la extremidad hacia abajo para tirar contra la gravedad:
Después de esta primera prueba que me di cuenta de intentar accionar dos juntas con un solo motor cambiado la palanca de las fuerzas en cada unión y dio lugar a la flexión no uniforme. Esto era menos que ideal.
Decidí probar compensar añadiendo tensión a la articulación de dos con varias configuraciones de bandas de goma. Esto no parece funcionar. Aquí está un ejemplo de ello:
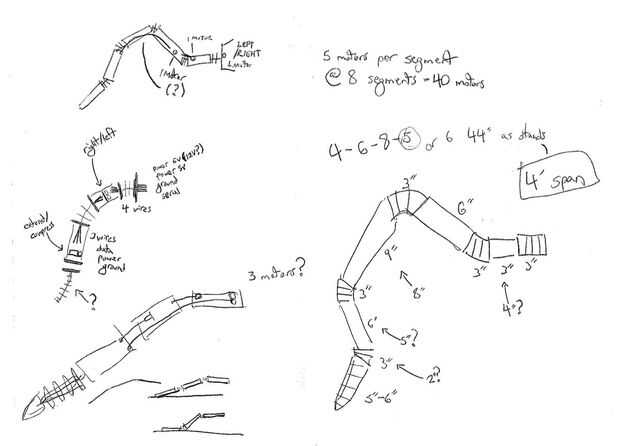
De estas pruebas me enteré de que iba a necesitar por lo menos un motor por junta. También aprendí que tener más de una de estas juntas iba a resultar en 90 grados de torsión e inutilizar la extremidad. Con todo esto en mente, decidí construir un robot con un empalme de la bisagra por segmento. Fue mi pensar que en lugar de usar un segundo motor para tirar de las piernas a un lado puedo confiar en su torsión inherente e inestabilidad para la locomoción. Además, era mi plan de utilizar la gravedad para devolver las piernas una vez accionadas.
 (impresión 3D)")












")