Paso 18: Deformación espacial con fuelle








La razón de que esto podría funcionar es porque cuando uno es alargada, una fuerza de compresión puede aplicarse a un segmento opuesto, causando el segmento atiesado a deformar y a doblar. Esto permitiría para la deformación en cualquier dirección dada. Este diseño permitiría también significativa compresión y expansión del segmento impreso. Esto le daría un número de características similares a un tentáculo real.
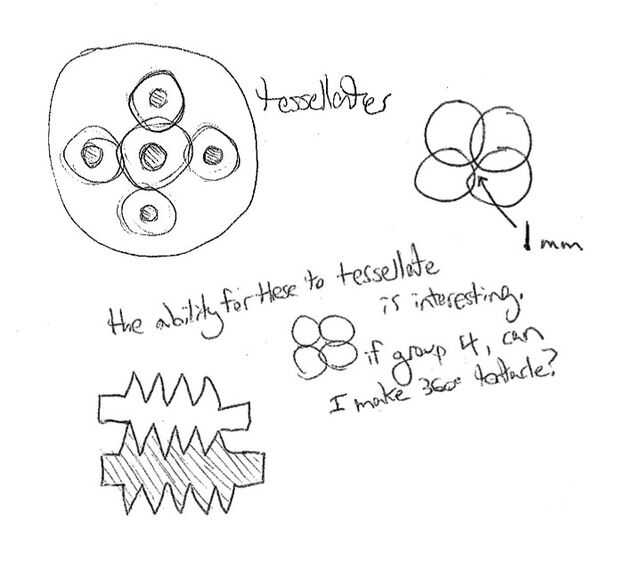
Mi primer diseño incluye cuatro fuelles cuadriculadas tal que cada uno labradas dos a cada lado. Después de pasar mucho tiempo limpiando el material de apoyo dentro del fuelle, se hizo evidente que había una columna entera de apoyo en el interior de la Asamblea donde se reunieron todos tres fuelles. Como el diseño en la actualidad, tengo no hay manera de sacarlo. Esto era un sistema nuevo porque impedía compresión completa.
He intentado imprimir, pero esta vez con un agujero de 2mm en cada extremo de la tapa. Este fue el más grande agujero que mi diseño me permitiría hacer. Este agujero era demasiado pequeño se utiliza para quitar cualquier cantidad significativa de material de apoyo y también resultó ser un fracaso.
Finalmente se me ocurrió que lo bonito de teselación fue que era infinitamente repetible. En lugar de tener los cuatro fuelles de bloqueo, puse un fuelle en el centro y uno a cada lado de él. Con este fuelle central me permitió colocar orificios mucho más grandes en el centro de la tapa, y finalmente pude retirar todo el material de apoyo. Esto también significaba que no tenía que afectar significativamente el diseño y fue capaz de mantener la misma cantidad de deformación, la compresión y expansión. Una desventaja de este enfoque fue que el diámetro del segmento un poco más grande.
Este diseño fue significativamente más fáciles de limpiar y sólo como prometedor. Sin embargo, noté que la parte no podría ampliar sin agrietarse a lo largo de la parece. Se hizo evidente que el siguiente necesita ser limitado a lo largo de su eje z para evitar hiper extender. También se hizo evidente, que cuando esté en uso, posición neutral del fuelle debe ser a mitad de camino entre su posición alargada y contratado, para permitir el estiramiento y la compresión del tentáculo.
Al principio, consideré restricción a lo largo del eje z con un cable fijado a lo largo de su canal central que permitiría que la compresa, pero no ampliar. Sin embargo, desde entonces he decidido un bateador enfoque puede imprimir una serie de bandas de goma gruesas con succión taza-como nódulos paralelos a lo largo del eje z.
A partir del momento de la publicación, todavía tengo que intentar cualquier acercamiento. Todos la mayoría de mis bramidos de deformación espacial tienen manchas con fugas de manipulación repetida. Tanto la impresión y la limpieza de una nueva toma una cantidad considerable de tiempo. En algún momento será revisar esto.
 (impresión 3D)")












")