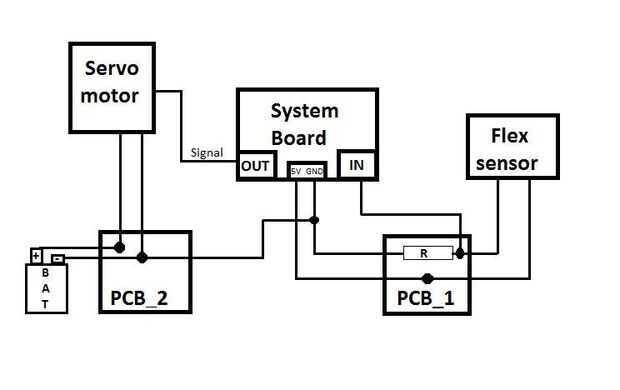
Los componentes básicos de la mano son los servos, la plataforma Arty, el guante y los sensores de flexión. El guante está construido con sensores de flexión que tienen resistencias variables que cambian su valor de resistencia al doblado. Está conectados a un lado de un divisor de tensión con resistencias de un valor constante en el otro lado. La plataforma Arty lee el cambio de voltaje cuando se doblan los sensores y activadores los servos para mover una cantidad proporcional. Los servos tiran cadenas que actúan como tendones, permitiendo que los dedos se mueven.



 (impresión 3D)")





")
