Paso 23: Empalmes Bendable


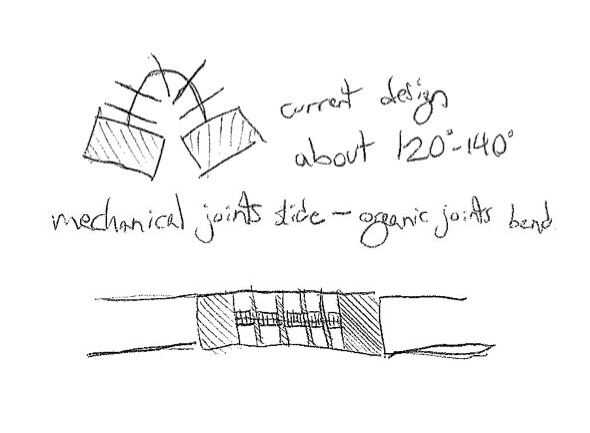
El primer paso hacia una solución no-hidráulico fue subido con una articulación flexible satisfactoria que puede ser tirada por un cable. Como Steven Vogel señala en "Gato de patas y catapultas", las uniones mecánicas suelen resbalar y deslizarse, pero doblan las articulaciones orgánicas. Me pareció muy importante que la articulación del robot debe seguir y realmente la curva. Mirando hacia atrás en los modelos anteriores, la cola de Pleo (que considera un tentáculo fallido) resultada para ser un modelo conveniente para un empalme de la bisagra.
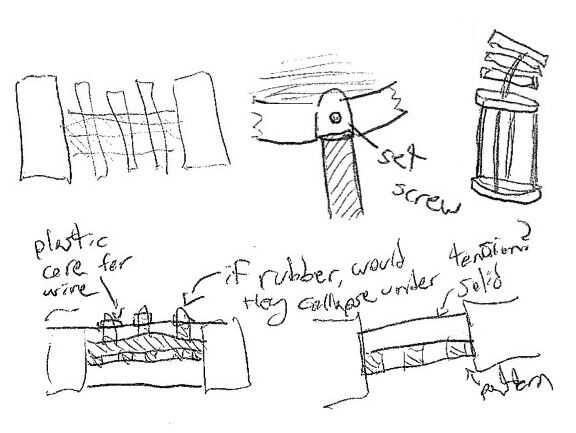
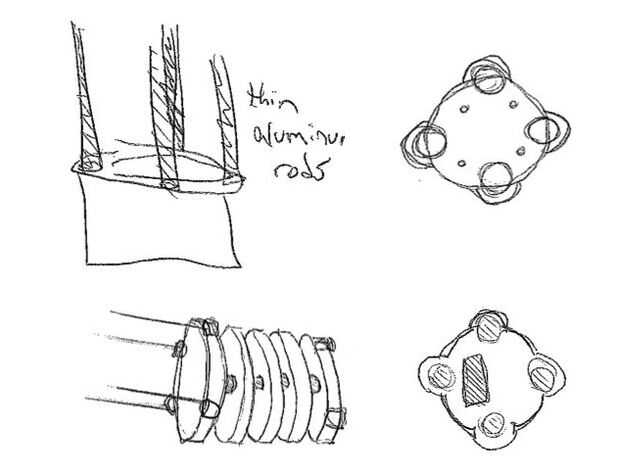
Mi diseño inicial fue creado para permitir la inserción de un tubo de PVC o tubo de aluminio de paredes finas en tapas de los extremos de la articulación. Sin embargo, después de imprimirlo, me di cuenta de que era infeliz con ella. No sólo fue pesado y con un lote de materiales, pero llegué a la conclusión de que la fijación de tubos huecos es un uso excesivo de material. Podría proporcionar la misma cantidad de estructura con significativamente menos material y decidió una solución mejor que un solo tubo hueco cuatro varillas de aluminio fino. Esto elimina la mayoría de los materiales voluminosos y pesados y generalmente hace el robot más ligero.
El diseño inicial era beneficioso en que tenía aproximadamente 140 grados de flexibilidad, que hace equivalente a una articulación del codo humano. Esto proporciona un buen indicador para hacer un empalme de araña más pequeño que sólo necesita sobre +-70 grados de flexibilidad del centro.
Mi próximo diseño tenía un ángulo de plegado de +/-90 grados y tenía un diseño considerablemente más ligero. En cada tapón había cuatro zócalos diseñados para que varillas de 3/16" a presión en. Celebro, en definitiva, con este diseño como una articulación de bisagra de propósito general.
 (impresión 3D)")












")