Paso 8: El tentáculo
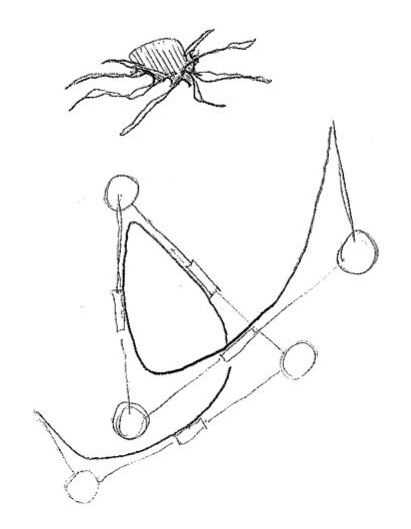

Las tres formas principales para describir el movimiento del tentáculo incluyen:
Alcance - aumentar la distancia entre las porciones proximales y distales del tentáculo.
Tire - disminución de la distancia entre las porciones proximales y distales del tentáculo.
No explorar - ningún cambio en la distancia. Movimientos lateral con flexión aguda localizada y torsión
También son capaces de cuatro deformaciones básicas que pueden ocurrir en cualquier punto en cualquier momento. Estas deformaciones son alargamiento, acortamiento, flexión y torsión (torsión). Estas deformaciones se producen en "pseudo juntas," que son curvas localizadas brazo que sirven como puntos de pivote.
Cuando bajo el agua, cefalópodos son aproximadamente neutral boyantes y suelen ser ligeramente más densos que el agua de mar. A causa de su animosa y rango de movimiento, son capaces de un comportamiento muy dinámico y se adaptan bien a este entorno.
Estos son algunos ejemplos de pulpos en agua:
Ya que la mayoría de la investigación que se centra en estos enfoque organismos sobre su movimiento en un medio acuático, sólo más tarde amaneció en mí que el dinamismo de los cefalópodos fue limitado seriamente por gravedad cuando la criatura fue retirada del agua. Aunque no pude encontrar ninguna investigación apoyando esta idea, pude encontrar una serie de videos que muestran cómo pulpos moverse fuera del agua. Mis observaciones de estos videos me han llevado a la conclusión de que mi hipótesis inicial era una suposición bastante precisa.
Los siguientes videos muestran sus movimientos fuera del agua:
Como se puede ver en los videos, aunque el pulpo todavía puede participar en una gama de movimientos, claramente están teniendo problemas para soportar su propio peso en relación con la gravedad. Mientras que una explicación puede ser que estos movimientos pueden ser un rasgo de comportamiento que exhiben solamente fuera del agua, una mejor explicación es que la gravedad dicta su movimiento por lo que es difícil para ellos soportar el peso de sus enormes cuerpos y tirando de ellos hacia el suelo.
Lo que esto significa para la robótica es que los tentáculos o que estoy haciendo sólo tienen que demostrar gran dinamismo si han de existir en un ambiente acuoso. De lo contrario, si la criatura del tentacle es vivir fuera del agua, es razonable para que puedan ser limitados por su propia masa. En lugar de ser capaces de levantar a sí mismo y mover dinámicamente en cualquier dirección mientras que en la tierra, los tentáculos deben ser mejor adecuado para se arrastre por el suelo por que se encrespa y desrizante unos sobre otros.
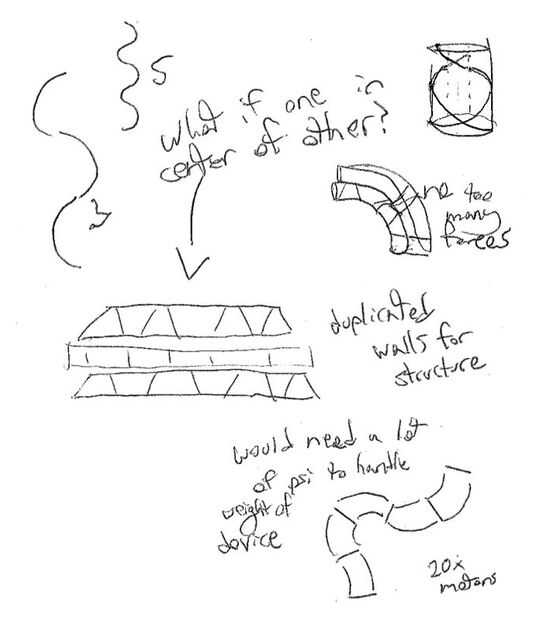
 (impresión 3D)")












")