Paso 3:
Conectar ahora los dos enlaces premontados en el brazo de accionamiento hacia delante (004).
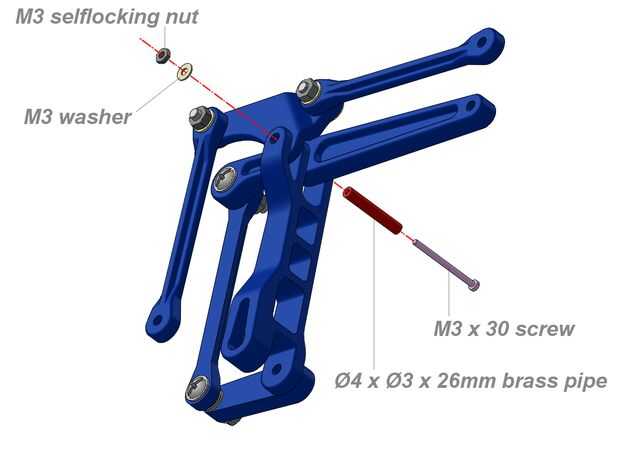
La batea en posición horizontal brazo (005) y enlace triangular (006) alineación con la conexión superior del brazo de accionamiento hacia delante (004). Introduzca el tubo de latón de Ø4 mm cruzando todas las partes y fijar con el tornillo M3x30, bloqueado por la tuerca en el otro lado.
Verificar la libertad de movimiento y si todo está bien, proceda al siguiente paso.

