Paso 2:
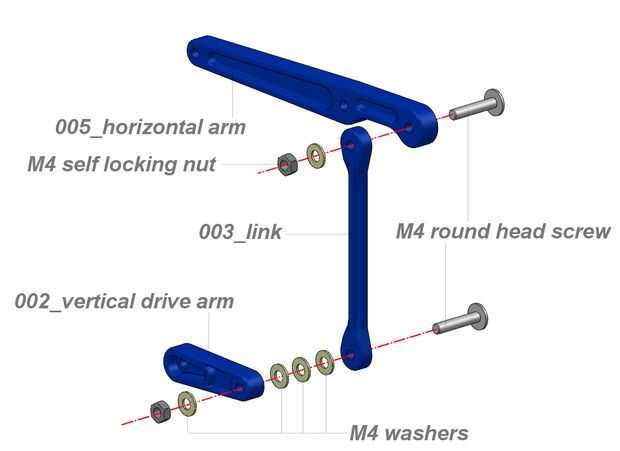
Conectarse link (003) la posterior articulación del brazo horizontal (005).
La parte inferior del enlace (003) debe ser conectado con el brazo de impulsión vertical (002) como se muestra.
Entre los dos enlaces interponer tres arandela M4, para alinearlos mejor con el brazo vertical
Mantener la M4 ronda las cabezas de tornillos a la parte interior y las tuercas autoblocante fuera

