Paso 5:
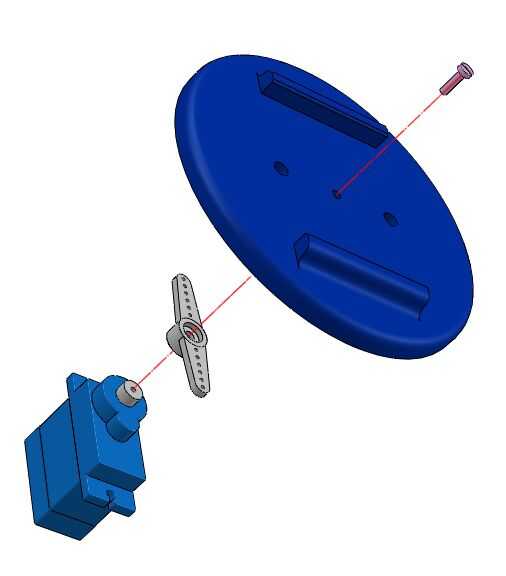
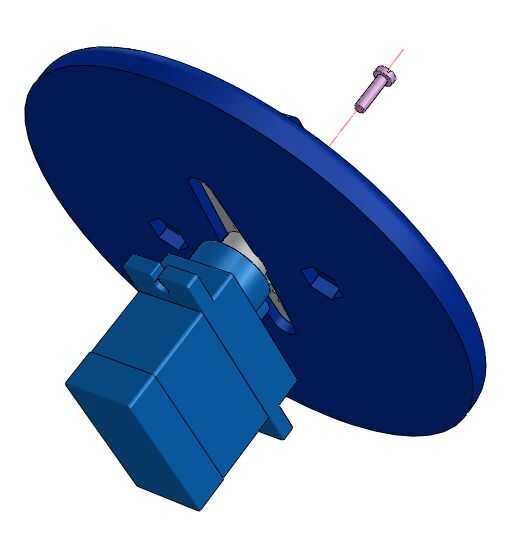
Asegúrese de que el servo esté en la posición neutral que instale la corneta de doble brazo en el eje estriado manteniendo los brazos paralelos al cuerpo del servo
Introducir el cuerno dentro de la caja debajo de la placa redonda y fijar el servo a la placa mediante uno de los dos tornillo largo suministrado con el servo (una pequeña en muy corto debido al grueso de la placa redonda)

