Paso 15:
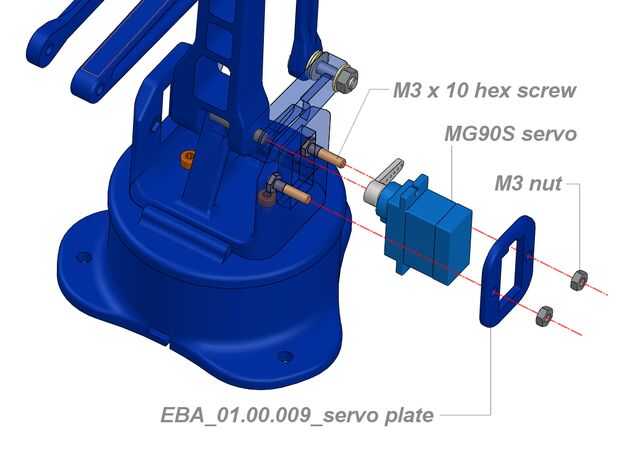
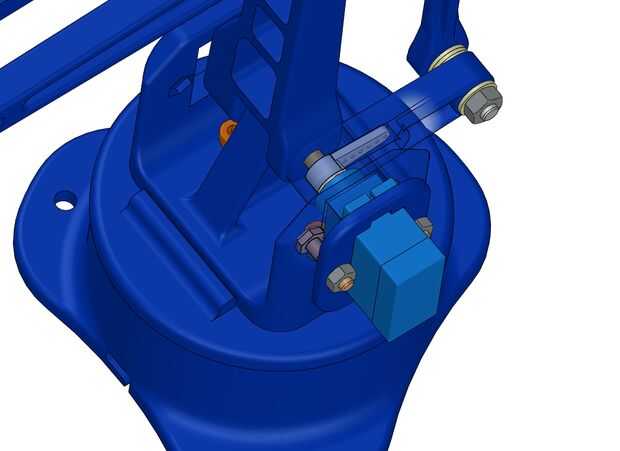
Ahora es el momento de instalar el servo que impulsan el movimiento vertical del brazo. Poner en el dedicate recipientes dos M3x10 tornillo hexagonal. El servo tiene que estar en la posición neutra con el cuerno en 90 grados a la derecha con la placa de prensa (009) instalada (hacer el cableado pasa a través de la ampliación del dedicado).
Introducir el servo en el asiento cuadrado en ángulo en la placa base y deslice el cuerno en la cubierta en forma de brazo que impulsa el movimiento vertical. FixT la placa de prensa contra el servo utilizando dos tuercas M3

