Paso 1:
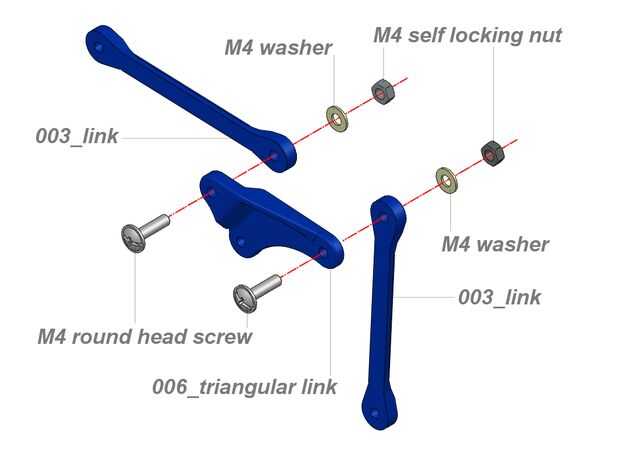
Conectar dos brazos articulados (003) el enlace Triangular (006).
Mantenga el M4 tornillos de cabeza redonda a la cara interna como se muestra en la imagen y seguridad las tuercas hacia el exterior.
IMPORTANTE
Diseño todos los agujeros de articulaciones bastante exactas para hacerlos más precisos utilizando una broca de
Las tuercas deben apretarse hasta la fijación de la articulación, y por lo tanto debe perderles hasta obtener un suave movimiento con la menor separación entre componentes. Esta regla es válida y debe ser aplicado también para el siguiente conjunto que implican el uso de tuercas de fijación del uno mismo.

