Paso 10:
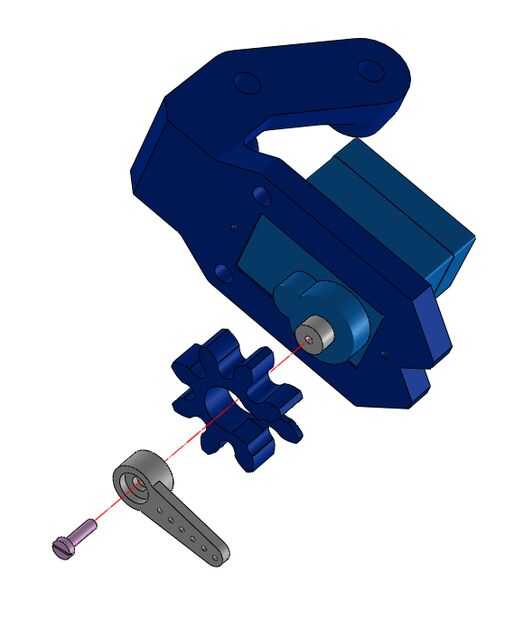
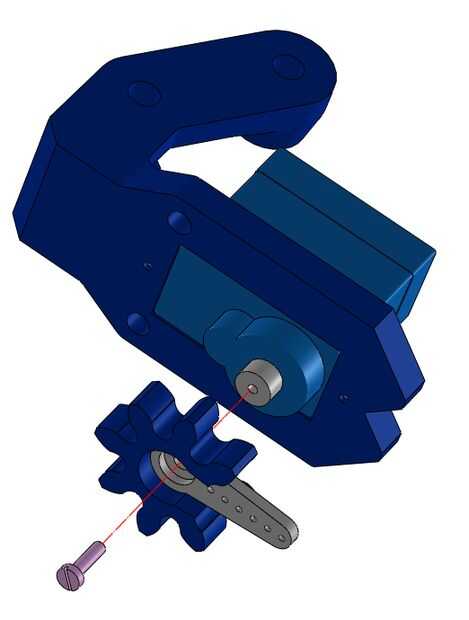
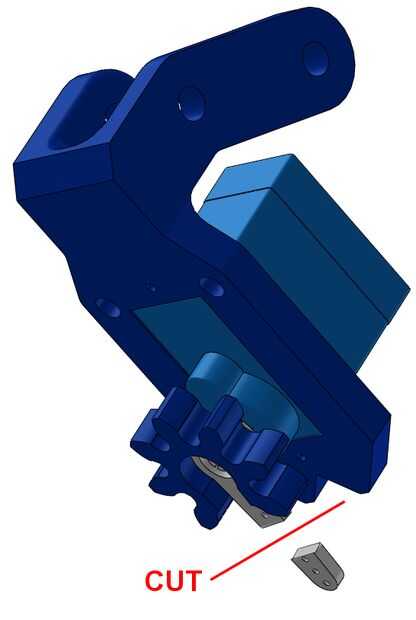
El cuerno tiene que alinearse hacia adelante con el servo en posición neutra. Cortar la parte del cuerno del engranaje usando un cortador de
El cuerno tiene que alinearse hacia adelante con el servo en posición neutra. Cortar la parte del cuerno del engranaje usando un cortador de

