Paso 12:
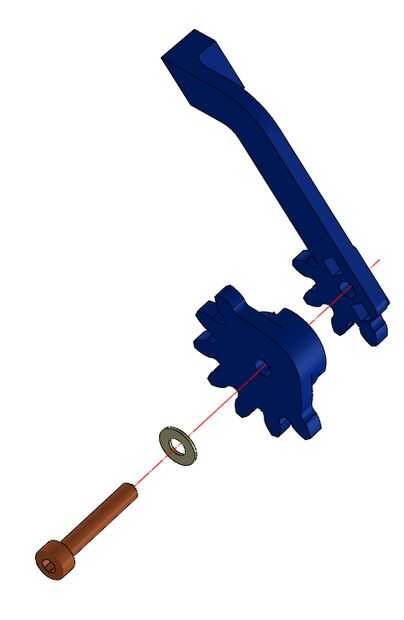
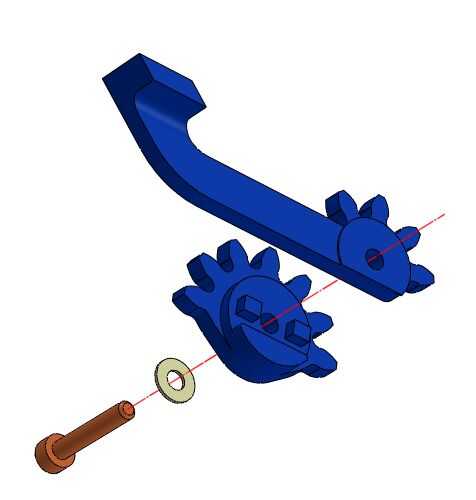
Inserte las dos clavijas del engranaje conducido el dedicado en el dedo izquierdo que el engranaje conducido también tiene un hombro que tiene que estar alineada con la parte lateral del dedo. Si encuentras dificultades acoplándolos, reducir la interferencia usando un archivo.
Una vez juntado insertar un M3 tornillo en el agujero central y coloque el dedo en el apoyo de la garra
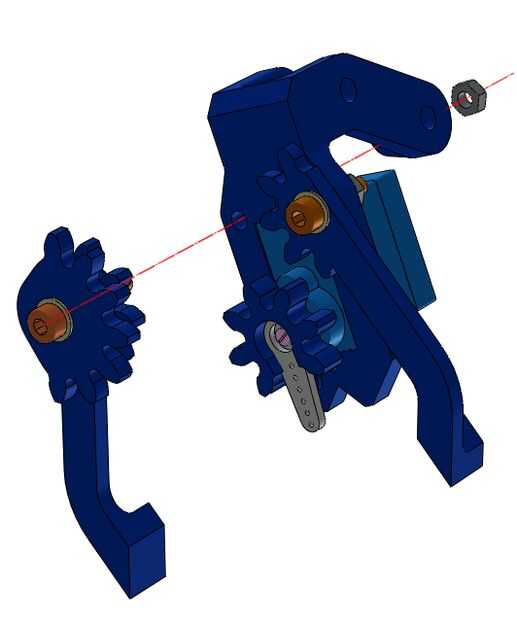
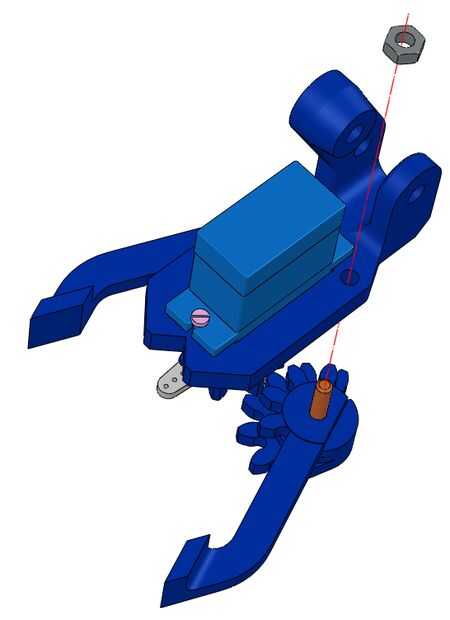
Ahora está lista para ser instalado en el brazo horizontal de la EEzybot la garra
Verificar libertad de movimiento de la pinza manualmente o con un comprobador de servos

