Paso 4: Paso a paso Motor(28BYJ-48) Control [AccelStepper]
28BYJ-48 es un paso a paso de 5v, los pasos más utilizados para Arduino, confundido al ver la imagen Presione el botón otra vez, ya dijo que va a hacer algo muy interesante con él ahora. Mucho más para explorar a ser paciente
Compruebe hacia fuera este instructable gran trabajo hecho por Mohannad Rawashdeh [esta fue la primera instructable que i trató de cuando empecé con 28BYJ-48]
Pero mi es un poco más fácil creo, coz estoy un utilizando una librería llamada AccelStepper
Primero descargar AccelStepper.zip y añadir a la biblioteca
Luego ir a través de la carpeta docs y leer el archivo .html de classAccelStepper miembros, ayudaría a entender el bosquejo
Objetivo 1 : - girar un motor paso a paso hacia la derecha y a la izquierda usando un array de transistores Darlington (ULN2003)
Cosas necesarias :-
- 1 X placa de Arduino conectado a la computadora
- 1 X placa
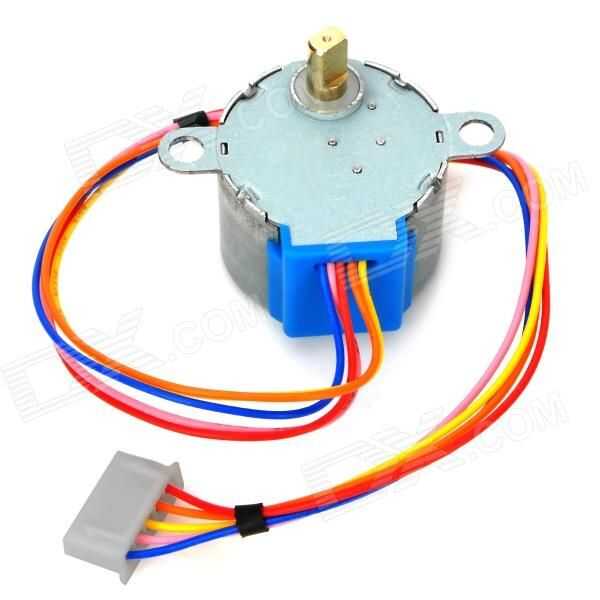
- 1 x Motor de pasos (28BYJ-48)
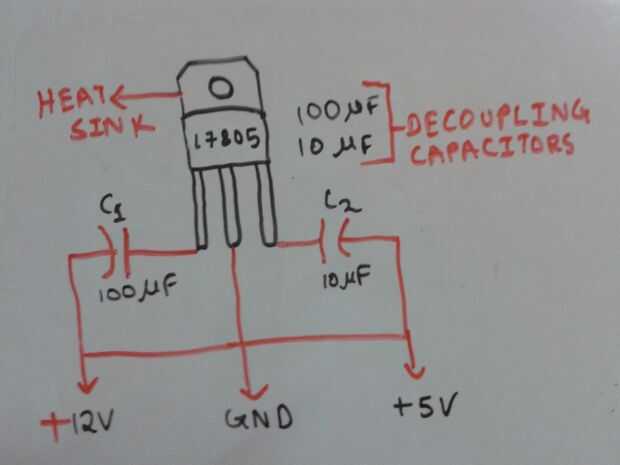
- 1 x L7805CV (o debería funcionar cualquier otro regulador de voltaje de 5 v) (la hoja de datos puede ayudar)
- 1 X ULN2003 Transistor Array IC
- 1 x 100 uF condensadores electrolíticos
- 1 x 10 uF condensadores electrolíticos
- 1 X disipador de calor (opcional)
- Cables de puente (como muchos necesaria)
- 9V - 12v fuente de alimentación externa
Procedimiento:-
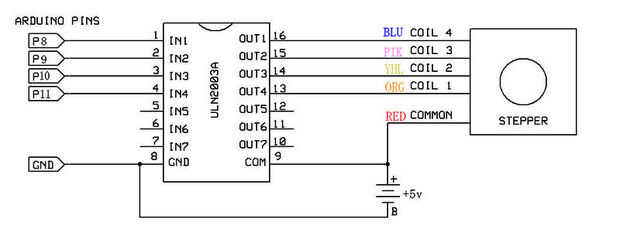
- Conectar el motor paso a paso al ULN2003 como se muestra en el esquema (Figura 1)
- Conecte las conexiones del ULN2003 para Arduino como se muestra en el esquema (Figura 1)
- La tercera imagen y conectar los condensadores de desacoplamiento para el regulador de voltaje (realmente no sé mucho acerca de los condensadores de desacoplamiento no dude me explicar si estoy equivocado).
- Conectar el pin de voltaje de salida (5V) y el GND en la matriz de transistores
- Debe haber un terreno común desde el ULN2003 para Arduino también. Como se muestra en la foto 1.
- Conecte la fuente de alimentación
- Entender y subir el Sketch "AccelStepper_test.txt"
Debería ver que el Motor gira una vez hacia la derecha y luego una vez hacia la izquierda y se repite.
Objetivo 2 : - para controlar la rotación a la derecha con un botón
Cosas necesarias:-
- Todo lo mencionado anteriormente.
- 1 X interruptor de botón.
- 1 x cualquier resistencia mayor de 1 k ohmios
Procedimiento:-
- Acabo de hacer exactamente lo que se dijo en el objetivo 1
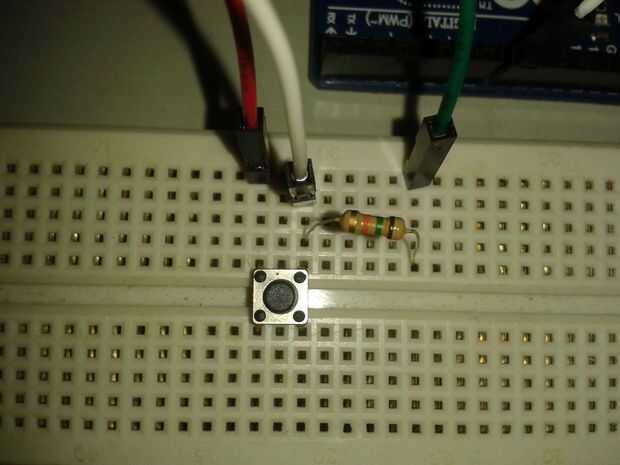
- Conecte el interruptor para el Arduino al igual que se hizo en el paso 1. Sólo que esta vez el puente blanco va al Pin Digital 7
- Entender y subir el dibujo "button_controlled_stepper.txt"
- Púlselo para ver el efecto.
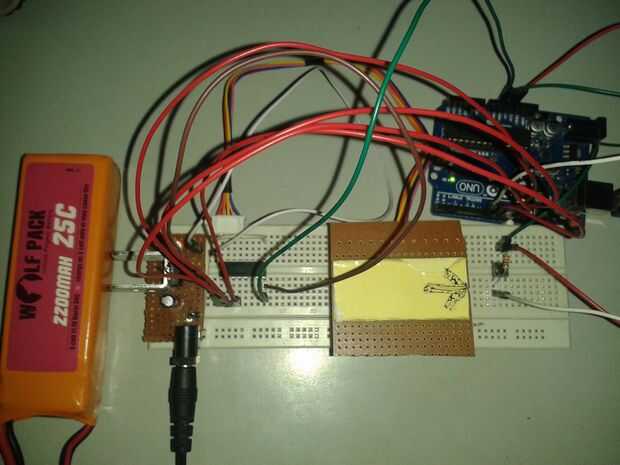
Su trabajo final debería ser algo parecido a la 4 º foto creo. Ignorar la flecha y la plataforma sobre el motor paso a paso por ahora, pero lo necesitarás más adelante haciendo el Robot.
Si quieres ver el vídeo.
Nota:- El paso a paso gira sólo 10 veces, si usted quiere girar más, simplemente pulsa el botón de reset de Arduino.
Sugerencia:- Leer a documentos de la biblioteca AccelStepper. Y otra vez leer los comentarios poco a poco pero constantemente
Más pasos vas más interesante es, ¿no es?




")

 Stage1Model2")

")
")
 /w Arduino")
")

