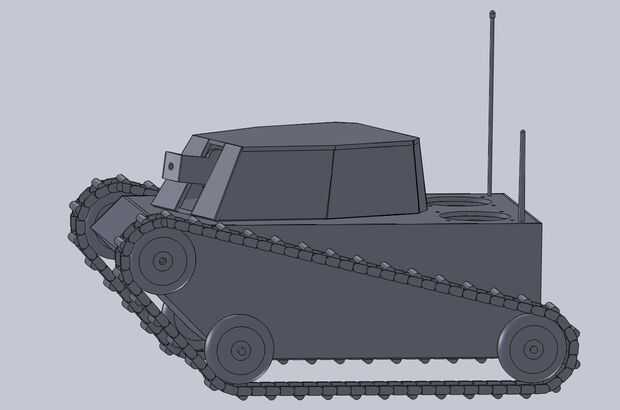

Nuestra primera idea fue crear un robot oruga capaz de subir escaleras y un montón de otros obstáculos, para llegar a una buena velocidad (alrededor de 10 o 15 km/h) mientras que la filmación y transmisión de datos. Se decidirá si puede ir a través de un obstáculo como una cuesta, escaleras o un agujero. Reconociendo personas y seguirlas, tomar fotos de panorama, seguir un camino designado GPS son sus objetivos.






 /w Arduino")

")

 Stage1Model2")
")
")
