Paso 3: RF - RX y TX módulos {biblioteca usada - VirtualWire}



Ahora va a ser un poco complicado.. .el objetivo es enviar datos sin hilos de dos HC-SR04 en otro Arduino que a su vez muestra las distancias en el Serial Monitor vía USB... El RF_TX_test.txt puede parecer un poco confuso pero a través de los comentarios muy bien... La nueva y líneas confusas se explican de una manera tan sencilla como sea posible... plzz mantener fe pasar al siguiente paso no crees cuál es venir.
Descargar el archivo .zip VirtualWire y añadir a la biblioteca
por favor lea primero el archivo VirtualWire.pdf y, a continuación, proceder.
Compruebe hacia fuera este instructable para mejor percepción sobre ésos RF barato - módulos de RX y TX
Objetivo 1 : - para conectar el módulo TX y el HC-SR04 para Arduino y programa para enviar datos inalámbricos
Cosas necesarias :-
- 2 X HC-SR04
- 1 X Arduino [si 2 placas Arduino no están disponibles, luego primero para controlar el paso de Atmega independiente primero sugeriría]. Definitivamente debe tener otro Atmega entonces.
- 1 x LED rojo
- 1 x placa [personas con tablero de 1 pan ajustan de alguna manera que se necesitan dos]
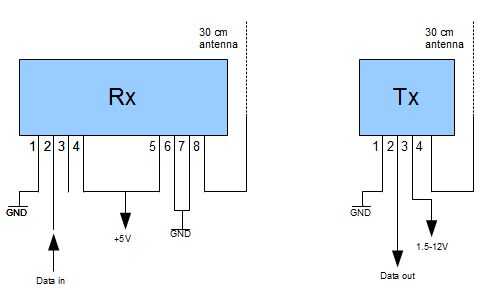
- 1 x RF - módulo RX y TX [usé el rojo uno, hay muchos modelos disponibles, no dude en elegir]
- 1 x 30cm alambre [el efecto de la hélice en la imagen no es necesario, sólo hizo el cable corto de longitud]
- Batería de 9V y broche de presión con el DC Jack y un interruptor deslizante [para alimentar el Arduino TX]
- Cables de puente [como muchos necesaria]
Procedimiento :-
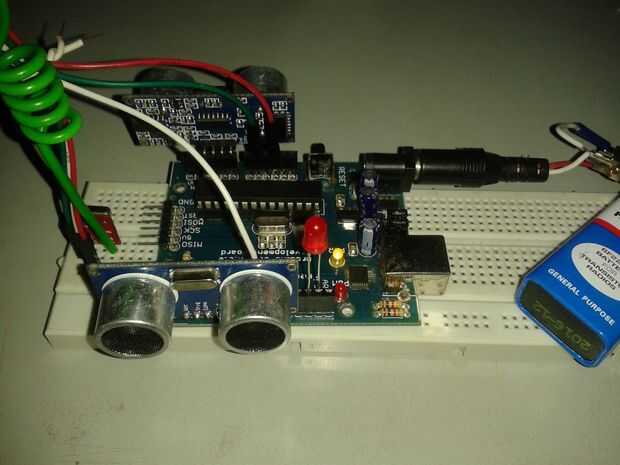
- Compruebe hacia fuera la primera imagen y conectar el módulo TX para Arduino
- Retira la segunda imagen e instale el HC-SR04 2 como se muestra
- Ir a través de RF_TX_test y entender en primer lugar, lea cuidadosamente los comentarios y las instrucciones
- Subir el archivo RF_TX_test . Después de subir se puede ver el LED parpadea muy rápido
- Desconéctelo de la computadora. Encender con la batería
- Ir al objetivo 2.
Objetivo 2 : - para conectar el módulo RX a Arduino y mostrar las distancias recibidas en el Monitor Serial
Cosas necesarias :-
- 1 X Arduino [si 2 placas Arduino no están disponibles, luego primero para controlar el paso de Atmega independiente primero sugeriría]. Definitivamente debe tener otro Atmega entonces.
- 1 x LED rojo
- 1 X placa
- 1 x 30cm alambre [el efecto de la hélice en la imagen no es necesario, sólo hizo el cable corto de longitud]
- Cables de puente [como muchos necesaria]
- Algunos cables pequeños (opcional) [sólo para hacer el cableado aseado]
Procedimiento:-
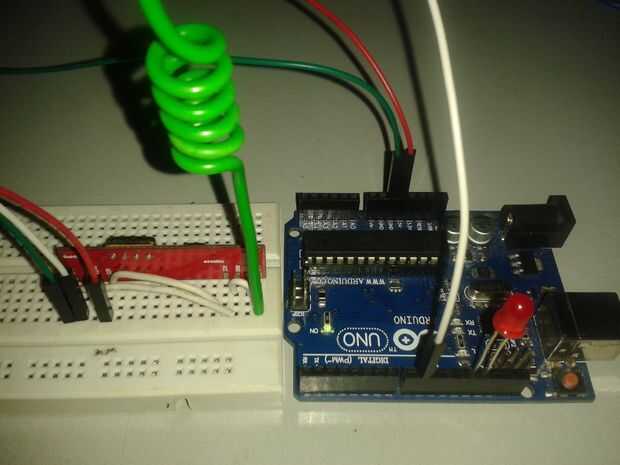
- Compruebe hacia fuera la primera imagen y conectar el módulo RX a Arduino.
- El cableado debe parecerse algo a la última foto.
- Ir a través de RF_RX_test y entender en primer lugar, lea cuidadosamente los comentarios y las instrucciones.
- Subir el archivo RF_RX_test . Después de subir no puede ver el LED parpadea coz probablemente el Arduino TX esté apagado.
- Encender el Arduino del TX y después de que el LED comience a parpadear.
- Restablecer el Arduino RX una vez. Entonces el LED RX empezará a parpadear después de un segundo
- Ctrl + Mayús + M para abrir al Monitor Serial
- Revisa las lecturas. Jugar con las manos un poco y comprobar el cambio en los datos.
Inferencia :-así que tienes comunicación de datos inalámbrica y Serial. Parece un lugar interesante vamos ahora creo. Sólo esperar y ver.
Sugerencia : - no lo rush y ser paciente y curioso, llevará apenas tiempo. Esto no es un proyecto de día.




")

 Stage1Model2")

")
")
 /w Arduino")
")

