En este tutorial quiero aprender algo, quizás cambiar de opinión. Y drones autónomos disponibles para todo el mundo.Simple pregunta es: ¿Qué necesitas hacer tu robot autónomo?.Respuesta:-GPS-Acelerómetro-Giroscopio-Sistema inalámbrico telemetría-Cáma
Como dice el titulo, vamos a ver cómo construir un robot móvil autónomo llamado Chefbot que es para servicio de alimentos y bebidas en hoteles y restaurantes.Este fue un proyecto de hobby y construí este robot después de ver un robot llamado Turtlebo
concepto GeneralNuestra primera idea fue crear un robot oruga capaz de subir escaleras y un montón de otros obstáculos, para llegar a una buena velocidad (alrededor de 10 o 15 km/h) mientras que la filmación y transmisión de datos. Se decidirá si pue
Concepto de JAAR no está haciendo casi un Rover.. .blindly como le digo y engañar... su más que haciendo un Robot... he incorporado la mayor parte de mi aprendizaje de los últimos 6 meses para este proyecto... hablando en serio yo soy apenas un princ
MICBot es un robot autónomo para detección de obstáculos y desviaciones y va alrededor,obras interiores o exteriores.Paso 1: Ultrasonido Sensor SFR05 Por lo tanto, esta solución utiliza el sensor de ultrasonidos como una medida de distancia y le perm
Introduction:Este proyecto surgió al tratar de hacer un robot autónomo de bajo costo para uso enEducación. La idea es que los estudiantes serían capaces de identificar con el controlador de Xboxy disfruta de hacking en algo mucho más interesante!Un d
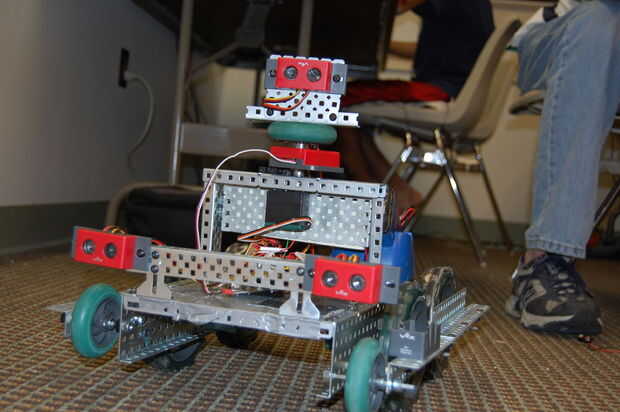
Mediados agosto de 2014 - decidí seguir robótica y construir un robot humanoide con grandes.Este robot sería construida en varias etapas. La etapa 1 es construir un Land Rover. Modelo1 enStage1 fue el Land Rover sin microcontrolador Model2 es uno con
Hola! Después pide una kabillion, aquí tienes! Este robot está ejecutando el EZ-B disponible en http://www.ez-robot.comPrimero una pequeña introducción, ver el vide: http://www.youtube.com/watch?v=OJiMUzJHYFkComencé con el juguete titulado "Wall-E in
¿Siempre se pregunta cómo autónomos robots están hechos? ¿Quería hacer un proyecto fresco? ¿Tienes un tablero de Linkit? Entonces estás en el lugar correcto!Aquí estará haciendo un robot con LinkitONE con piezas robóticas y servomotores.Permite comen
Todos los no parcialmente programación del robot VI requiere spdt interruptores que pueden obtener fácilmente activados, pero no tengo ese lujo. Así que hice un simple y fácil de hacer robot parcialmente autónomo.Paso 1: Ir a buscar las cosas2 x moto
dos ingenieros no se deben dejar solos durante una tormenta de nieve con gingerbread y un microcontrolador. Los siguientes documentación de los resultados:Se trata de un acantilado autónomo detección robot de pan de jengibre, comúnmente conocida com
Me encanta a todo tipo de robots especialmente autónoma o robots inteligentes, que tienen una inteligencia un poco más que evitar un obstáculo. Así que he decidido que voy construir mi propio robot inteligente barato tiene una estructura en la cámara
Hace unos meses, terminé mi primer curso de electrónica online. Fue una nueva experiencia, pero despertó en mí una vieja pasión mucho sueño, la electrónica!El curso era: EE40LX: Interfaces electrónicas, a través de la plataforma EDX y administrado po
en esto instruir capaz, le mostraré cómo transformar una araña normal error hexadecimal, un robot inteligente con sensores en él.Paso 1: Partes y materialesPartes:(1) Hex bug araña(2) un sensor de distancia por ultrasonidos Ping(3) un escudo de proto


")



 Stage1Model2")


")
")
 /w Arduino")

")