Paso 11: Integración de los dibujos - parte 2 (Atmega 3)

Como el título indica este paso es para Atmega 3 como se menciona en el primer diagrama... Este paso será más o menos similar al paso anterior. Vamos a ir
Objetivo 1:- Contar el tiempo necesario... para que el módulo inalámbrico TX 64 distancia datos de cada sensor al Atmega 2... y también hacer uso de la vez anterior, es decir, 5,150 secs de lectura.
Cosas necesarias:-
- Todo lo que necesario en el objetivo 1 del paso 3.
Procedimiento:-
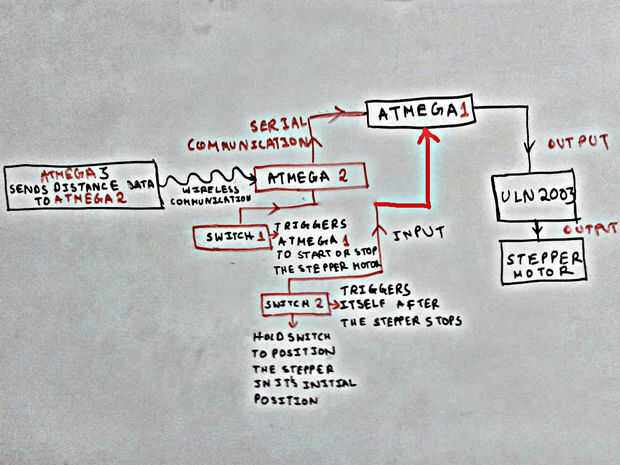
- Sólo juntar todo apenas como su muestra en la imagen 2.
- Conecte el USB a la computadora.
- Copie el código de ATMEGA_3_test .txt en el IDE y analizar para rato.. .me verá la mayor parte del código es copiado paso 3 y no mucho agregado a él.
- Cargar el código
- Presione Ctrl + Mayús + M
- Tenga en cuenta la lectura en el monitor Serial
- Pulse el botón reset en Arduino. Otra lectura aparecerá en el Monitor Serial
- Hacerlo por al menos 10 veces.
- Se verá que la mayoría de los valores de tiempo de ejecución son diferentes.
- Hacer un promedio y nota abajo. tengo 4058 milli segundo. Que significa ping y enviar los datos al Atmega 2 su toma ms 4058 sin y retardo manual. Pero recuerde que necesita tiempo para ser ms 5150 del paso anterior
- Por lo tanto, tiempo extra para retrasar por rotación = 5150-4058 = 1092 ms tiempo para retrasar por 64 pasos = 1092 / 64 = 17.0625 = 17 ms
- Ver su propia lectura y siga el procedimiento nº 11
- Abrir el ATMEGA_3_test en el IDE, al final de la función test() un delay(17); línea se comentó
- Descomente la línea y poner su valor deducida en su
- Cargar el programa modificado.
- Ctrl + Mayús + M
- Compruebe si el valor impreso es cerca de 5150 o no, si no no estar desanimados es lo mejor que se puede hacer, no es su culpa, su debida a los principios de la propagación del sonido.
- Averiguar el problema y comentar aquí.
Objetivo 2:- A subir el verdadero Sketch
Cosas necesarias:-
- Igual que arriba
Procedimiento:-
- Sólo subir el txt ATMEGA_3.
- Extraer los 3 Atmega de Arduino y asígnele el nombre ATMEGA - 3
- Se olvidó de decirle a desconectar el USB, que espero que no tan ficticia.
- Inferencia:- Después de ver un comportamiento ridículo del sensor de la distancia debe ser molesto este problema es discutido en el paso 13, cómo ocuparse de ella y de la materia.
Continuación hasta el último paso, después el siguiente paso tu robot va a transformar a un Rover.
Chicos y chicas no dude en enviar cualquier sugerencia sobre cómo afrontar este problema y ayudarme a hacer mejorar este instructable




")

 Stage1Model2")

")
")
 /w Arduino")
")

