Paso 6: Cargar el firmware de prueba (FingerLib - MotorTest)

En esta etapa que nos estamos queriendo probar la Junta almendra trabaja de modo que podemos extender los motores con el fin de permitirnos fijar los tendones del dedo.
Se necesita:
- Asamblea de mano
- Fuente de alimentación de 12V DC
- Cable micro del USB
- Computadora
Descargar e instalar Arduino
Para cargar el software de prueba en la mano lo primero que tenemos que descargar el IDE de Arduino.
- Vaya a www.arduino.cc/en/Main/Software
- Descargar la última versión de Arduino
- Una vez descargado, ejecute el archivo de instalación y siga las instrucciones para instalar Arduino
- Si usted tiene cualquier problema, hay una serie de tutoriales en YouTube
Descargar FingerLib
Una vez instalado Arduino, tenemos que descargar FingerLib.h, una biblioteca personalizada escrita por biónica abierto para manejar el control del motor y otras tareas específicas de la Junta. FingerLib.h incluye varios dibujos de ejemplo para las funciones de control de dedo simple y también es utilizado por el firmware de la alcachofa para el sistema de control de la mano completa.
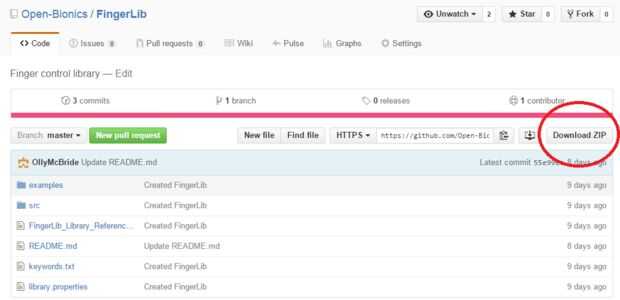
- Vaya a www.github.com/Open-Bionics
- Descargar FingerLib como un ZIP
- Extracto de FingerLib-master.zip
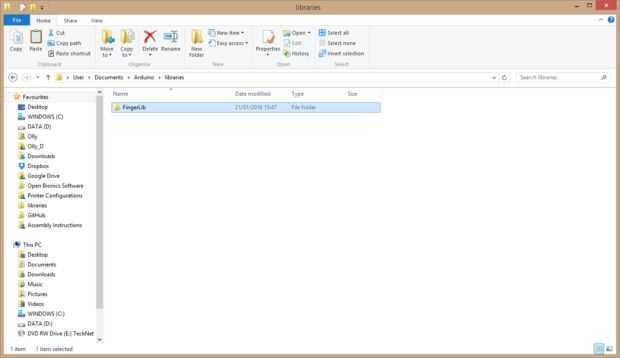
- Renombrar el archivo 'FingerLib-master' a 'FingerLib'
- Mover la carpeta FingerLib a la carpeta de las bibliotecas de Arduino
- Mi Documents\Arduino\libraries
- Cerrarlo y abrirlo nuevamente para reiniciar Arduino
Cargar el código de ejemplo
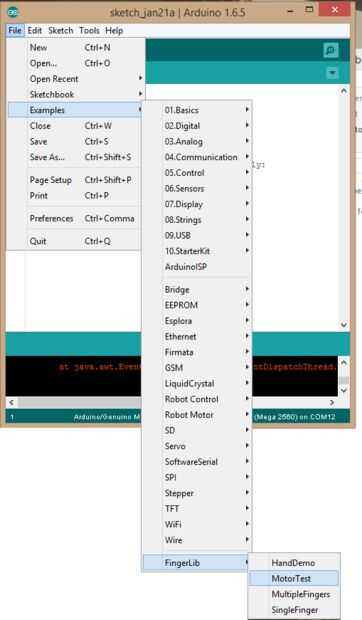
Una vez que se ha instalado la biblioteca FingerLib, abra Arduino y abra el ejemplo de 'MotorTest'.
- Abierta Arduino
- Abierto 'File -> Sketchbook -> bibliotecas -> FingerLib -> MotorTest '
- Esto debe abrir el ejemplo MotorTest de FingerLib
Ahora necesitamos encender y conectar a la tarjeta.
- Conecte la fuente de alimentación de 12V DC a la C.C. en la muñeca (el agujero en el conector de la muñeca izquierda)
- Enchufe el cable micro del USB a la mano por la muñeca (el orificio del lado derecho en el conector de la muñeca)
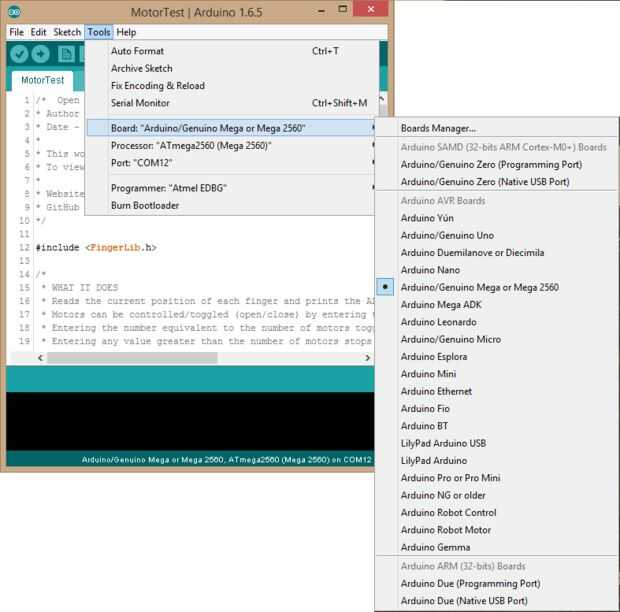
- Dentro de Arduino, seleccione la placa que estamos utilizando
- 'Herramientas -> Tabla -> Arduino Genuino/Mega o Mega 2560' (el nombre de junta puede difieren según la versión del Arduino se utiliza, asegúrese de que la Junta seleccionada se refiere a la Mega 2560)
- Seleccione el puerto COM para la Junta
- 'Tools -> el puerto -> COM?' (donde el '? ' es el número de puerto COM de la Junta Directiva de almendras)
- Con el Consejo seleccionado y conectado, haga clic en el botón de flecha/cargar para compilar y cargar el ejemplo MotorTest a la Junta de almendra
Ejecutar MotorTest
Con el ejemplo de MotorTest subido, ahora debemos ampliar los cuernos motor en preparación para los tendones del dedo.
- Con el ejemplo de MotorTest cargado de la Junta de almendra, conectar a la tarjeta con el Monitor Serial
'Tools -> a Serial Monitor'
Ahora debe tener la mano montada con todos los cuernos motor 5 extendidos, el siguiente paso es sujetar los tendones del dedo.





")

")





