Paso 1: Impresión y extracción de materiales de apoyo
En primer lugar, necesitaremos imprimir los 4 componentes principales de la mano robótica de la Ada, los archivos pueden encontrarse en YouMagine o en thingiverse.
Se necesita:
- 200g Ninjaflex
- 100g PLA/ABS
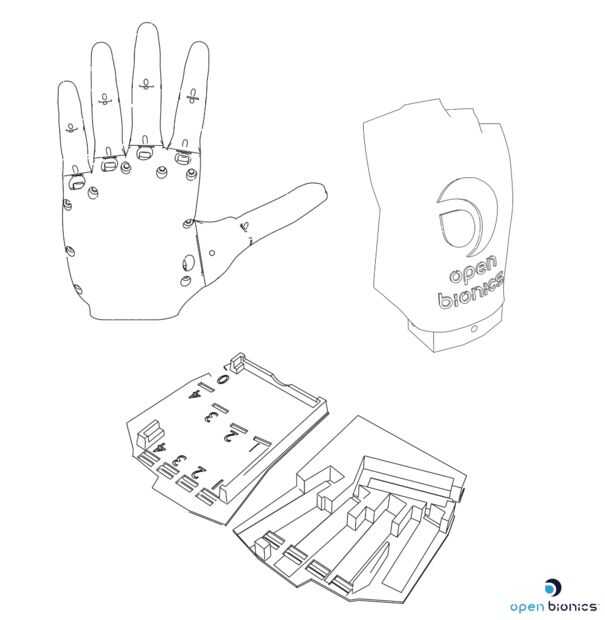
Piezas impresas 3D:
- Palma
- Bandeja de PCB superior
- Bandeja de PCB inferior
- De la contraportada
La palma debe ser impreso en Ninjaflex, y todos los otros componentes se imprimen en PLA o ABS (cualquiera sienta más cómodo con la impresión). Tenga en cuenta que la mayoría de estas piezas requieren ayuda a imprimir con eficacia.
Para una información más detallada en la impresión de la mano de Ada, visite este tutorial.
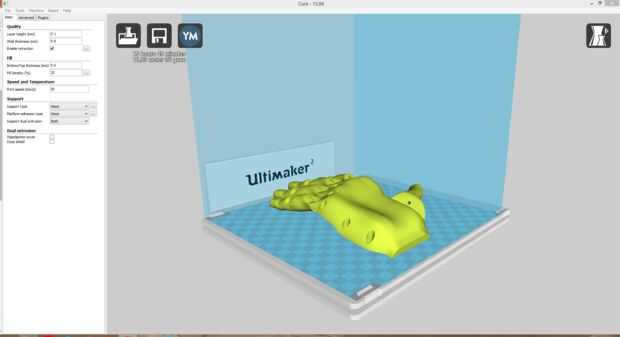
La palma
- Para imprimir la palma Asegúrese de que la parte esté orientada correctamente, para que la muñeca y los dedos son tanto la parte inferior más puntos del modelo (fotografiado)
- Nuestra configuración de impresión recomendado de Ninjaflex es los siguientes
- Altura de la capa 0,3 mm
- Llenar densidad 45%
- Material de apoyo
- Tipo: Tocar la placa de construcción
- Ángulo: 30°
- Densidad: 25%
- Velocidad de impresión
- Relleno 20mm/s
- Exterior 16mm/s
- Calota interior 20mm/s
- La impresión generalmente toma alrededor de 20 horas, pero tiempo de impresión puede variar dependiendo de las configuraciones de impresión
- Una vez impresa, retire la palma de la cama y utilice pinzas para extraer el material de apoyo de la parte posterior y dentro de la mano
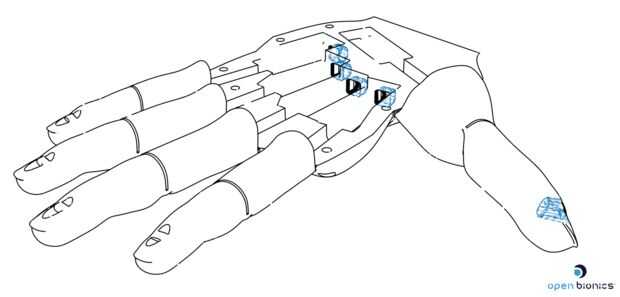
- También Retire todo el material de apoyo en los agujeros de la bocina motor grande y en la parte posterior de las ranuras de motor (en la foto)
- También debe quitar cualquier material de apoyo dentro de la punta del pulgar, pero asegúrese de que no dañar el punto de fijación del tendón en la punta del pulgar
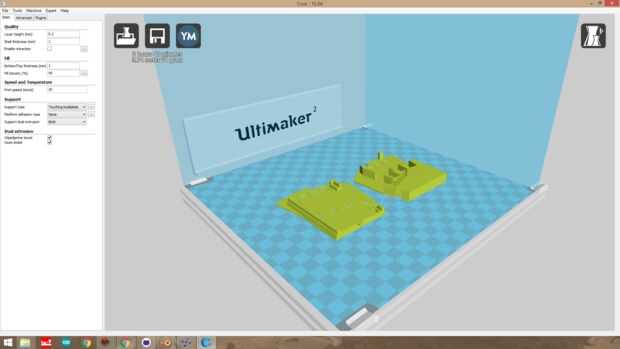
Bandeja de PCB
- Impresión de los componentes de bandeja de PCB (superiores e inferiores) en PLA (o ABS) para que las caras planas están en la cama
- Estos componentes no requieren de ninguna ayuda para imprimirse y suelen tener alrededor de 2 horas
- Estos componentes se pegan en el paso 3
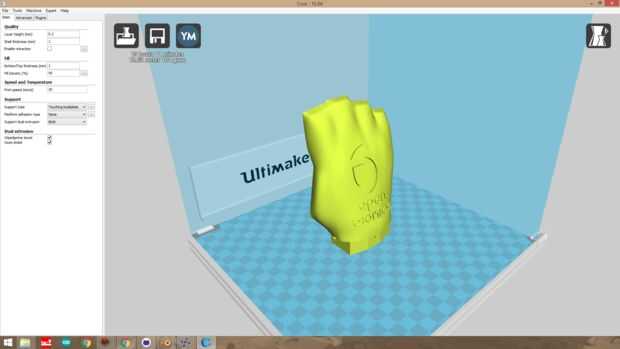
De la contraportada
- Imprimir la tapa trasera con soporte en PLA (o ABS) y orientada para que la muñeca está en la cama y la parte vertical
- Esta parte toma alrededor de 6 horas para imprimir
- Una vez impresa, retire el soporte del interior de la tapa y dentro de los agujeros del cable en la muñeca
Ahora usted debe imprimir y limpiar la palma, PCB bandeja y tapa posterior, el siguiente paso consiste en la introducción de los motores en la palma.





")

")





