Paso 3: PCB bandeja de montaje
Después de haber insertado todos los motores, el siguiente paso es montar y montar la bandeja de PCB.
Se necesita
- Palma con motores
- 3D impreso PCB la bandeja superior
- 3D impreso bandeja de PCB inferior
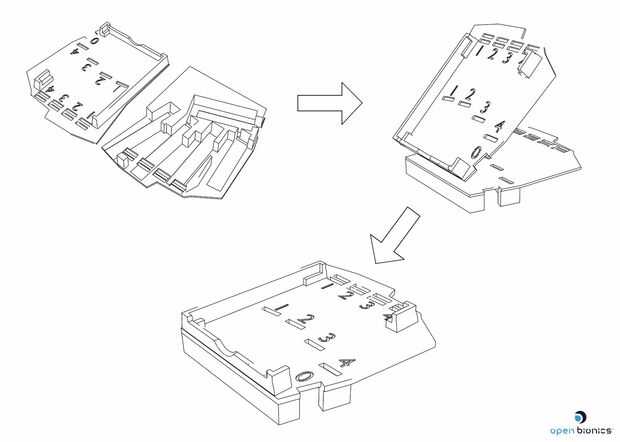
Montaje de la bandeja de PCB
La bandeja de la PCB está formada por 2 componentes separados que deben ser Unidas con pegamento.
- Coloque la bandeja inferior del PCB en la mesa con el lado plano grande hacia arriba
- Inspeccione el envase del pegamento especial que se utiliza para determinar el tiempo de secado. La mayoría superglues pondrá en pocos segundos. Asegurar también el pegamento es conveniente para el uso con los plásticos y están siguiendo las pautas de seguridad
- Aplique una capa delgada de pegamento en la cara superior de la bandeja inferior de la PCB
- Alinear un extremo de la bandeja superior de la PCB con el de la parte inferior. Luego presione los dos componentes juntos para que las caras planas se convierten en fijos, asegúrese de que las ranuras del cable línea. CUENTA que tendrá muy poco tiempo para reajustar la posición relativa de los componentes antes el adhesivo se seque
- Permite algunos minutos para que el pegamento se cure por completo
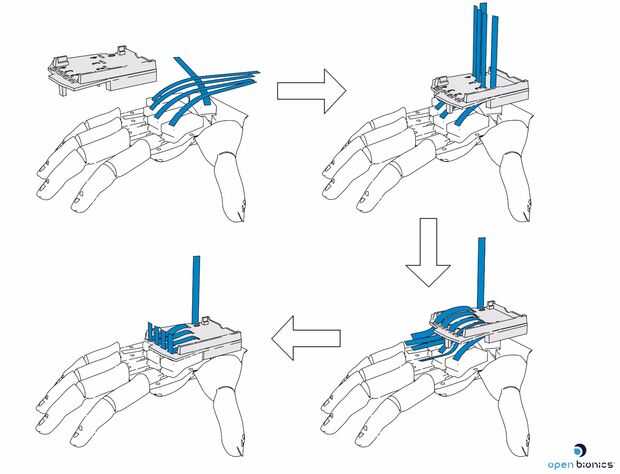
La bandeja de montaje
La bandeja de la PCB está diseñada para mantener los cables del motor en su lugar y permitir que la PCB para montar dentro de la mano.
- Coloque la palma con Palma de motores hacia abajo sobre la mesa
- Pase el cable del motor para cada motor a través de la ranura correspondiente en el centro de la bandeja de PCB. Los números en la bandeja de PCB deben estar hacia arriba. Tenga en cuenta que el motor 0 (el pulgar) no tiene una ranura, sólo una muesca
- Enrosque cada cable hacia abajo por el interior del par de ranuras en el borde del dedo de la bandeja de PCB. Los cables se deben meter ahora a la parte inferior de la bandeja
- Pase los cables hacia arriba a través de las ranuras restantes
- Pulsa la bandeja de PCB en la parte superior de los motores. Debe ajustarse cómodamente a su alrededor
- Asegurar que el cable del motor del pulgar está en consonancia con la muesca marcada 0
- Pase el cable del motor para el pulgar alrededor del boquete en el lado de la bandeja
- Asegúrese de que no haya ninguna holgura en los cables del motor pasando por la bandeja de PCB
Ahora debería tener algo parecido a las fotos de arriba, el siguiente paso es conectar la electrónica Junta almendra.





")

")





