Paso 11: Impresión con un Swarmscaper!




Es importante tomar precauciones cuando se trabaja con partículas finas. Recomendamos usar seguridad gafas y respiradores para no inhalar las partículas de polvo en el aire.
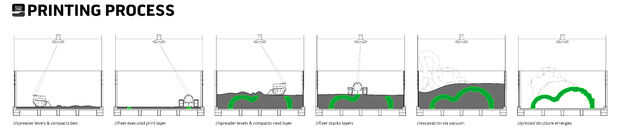
Antes de poner cualquier material en la cama, se recomienda colocar que una lámina gruesa de cartulina, espuma o madera contrachapada que es ligeramente más pequeña que las dimensiones de la cama de impresión. Esta será la base para el modelo de salida, y hace que el modelo se puede quitar fácilmente sin dañar.
Por falta de tiempo, nos puso el material en la cama con una pala y manualmente uniformar hacia fuera a mano. Lo primero que debe hacer aquí es coger la pala y pala 2 palas lleno de aserrín (u otro material granular que se trata) en la cama. La cantidad de cucharadas necesarias por capa puede ser ajustada y variada, sólo encontramos que 2 bolas funcionó bien para lo que estábamos haciendo. Alisar la capa superior de serrín con la mano.
El siguiente paso importante es el serrín de la compresa. Tomamos un 24 "x 46" x 3/4" pieza de madera contrachapada, lo colocó en la cama y entonces estaba parado en él para comprimirlo. Esto permite que el robot sea capaz de conducir sobre el aserrín con poca dificultad.
Estas cosas deben repetirse para cada monocapa. Y no te preocupes, el paso de compresión no daña la impresión! De hecho ayuda a la cola se unen al aserrín más eficientemente.
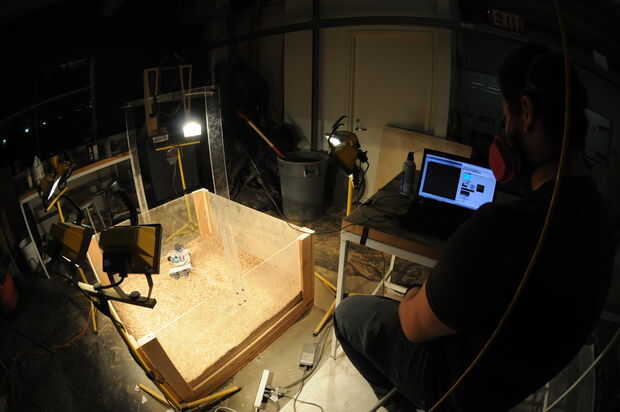
Ahora, usted necesita llenar la tolva del robot con la solución 2:1 pegamento y agua y colocarlo en la cama de impresión. Es mejor colocarlo como cerca del primer punto de saltamontes/rhino como sea posible. Esto es principalmente debido a algunos bugs conocidos en nuestro script que podría cagarla un par de cosas. Tratar de que en línea con la dirección que el bot se conducir y no toque el punto exactamente. Asegúrese de que todas las baterías están cargadas y encienda el interruptor para el robot empezar.
En saltamontes, asegúrese de que todo esté alineado correctamente y asegúrese de que el registro se ha reajustado y se activa en false. Esto debe regularse para cada monocapa. Encienda la escritura Uno y puerto abierto girando en True. Éstos pueden quedar tensado en true para el resto de la vez que imprima.
Asegúrese de que las lámparas halógenas están encendidas. Estos añadir calor a la impresión, que encuentra a doble tiempo de secado.
Tiempo para ver la Swamscaper ir! Viajará de punto a punto hasta alcanzar el último punto, y todo se apagará (excepto para la electrónica por supuesto, usted necesitará esto apague).
Retire el robot y repita poniendo el material y todo lo mencionado más arriba. Sólo descarga 2 cucharadas más de aserrín sobre la última capa.
Para la excavación, esperamos al menos 24 horas antes de que nos tocó la impresión. Si hay un agente de enlace más eficiente y rápido secado usado, podría reducirse este tiempo de espera. Para excavar, quitar las paredes de acrílico de la cama de impresión y deje que el aserrín que rodean el vertido del objeto hacia fuera sobre una lona. Luego con cuidado tomamos el vacío y aspiran alrededor del objeto y en él hasta que todo el exceso de polvo fue quitado.
Es posible fortalecer el objeto con un adhesivo en aerosol o laca al terminar el objeto.









")
")
")

