Paso 10: Investigación de materiales y posibilidades
A través de diversos estudios, hemos probado un método para la impresión con aserrín, y estamos seguros de que cualquier material granular puede trabajar con más exploración en diferentes aglutinantes.
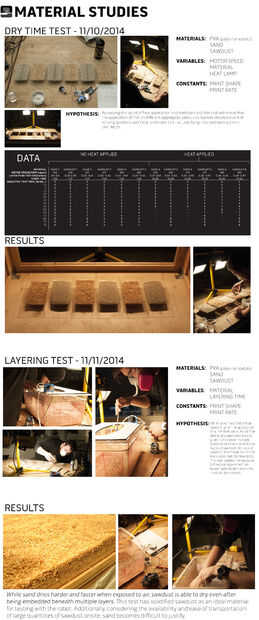
En nuestros experimentos, hemos encontrado que la arena funciona realmente bien, sin embargo toma mucho más tiempo para corregir que el aserrín cuando se utiliza acetato de polivinilo como un aglutinante debido al proceso de estratificación. Debido a esta restricción, optamos por aserrín porque es listo para la excavación después de 24 horas.
Hubo 2 primarios experimentos que realizamos y que probaron capas y tiempo de secado. En el primer experimento, la hipótesis de variando la velocidad de deposición así como la adición de calor produciría diferentes tiempos de secado para los materiales. Adición de calor terminada duplicando el tiempo de secado para los materiales, donde la fuente de calor era una lámpara halógena. Velocidades diferentes, sin embargo, parecen tener poco efecto con el tiempo seco, a pesar de la saturación de material mayor.
En la prueba y de que la hipótesis arena tomaría más tiempo en secarse con PVA de serrín, a pesar de que se seque más duro y más fuerte cuando está expuesto al aire. Nuestras pruebas demostraron esto para ser el caso, que hizo aserrín una opción mucho más viable para continuar nuestras pruebas de impresión. Serrín seca sin problema cuando se sumergió debajo de varias capas con PVA, mientras que arena tiene cierta exposición al aire.
Sería interesante llevar a cabo más de estos experimentos con diversos agentes que podrían ser más adecuados para un material como arena.









")
")
")

