Paso 6: Hacer el trabajo de programación

Una vez que se han instalado todos los plugins y software, la definición de Grasshopper en el paso anterior debería estar lista para ir.
El script funciona por un método de punto a punto controlado por visión de seguimiento, donde divide una curva en una serie de puntos, y el robot se mueve de un punto a la siguiente en orden, depositando a aglutinante como va. Una vez que alcance el primer punto, se enciende la bomba de parastaltic, y el robot comienza depositando el líquido de la Unión. Una cámara recoge el marcador fiduciario y localiza el robot en el espacio (que es de Rhino) basado en el reconocimiento del marcador. El fiduciario es reconocido como un avión en saltamontes, que se desglosan en componentes del vector. Estos vectores son cómo se calcularon la dirección y el ángulo de la máquina en orden para el robot debe poder moverse de un punto a otro, dibujando la forma que se le dio.
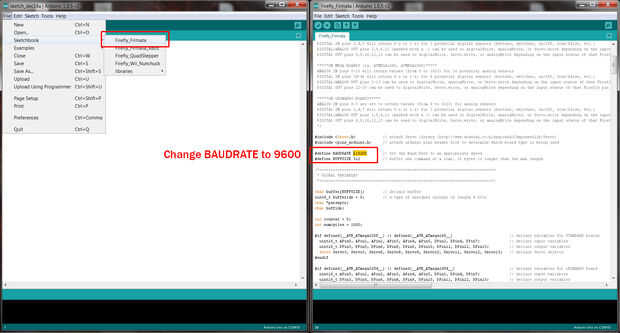
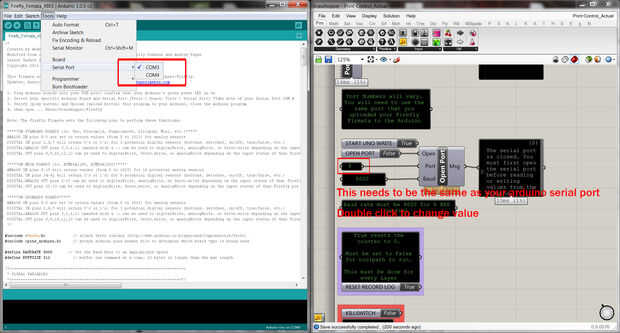
La primera cosa a hacer es conseguir que el Arduino cargado con el firmatta de la luciérnaga puede ejecutar a través de saltamontes. Usted necesitará abrir el IDE de Arduino, ve a 'Archivo' y pasa el ratón sobre 'Sketchbook'. Haga clic en el archivo que dice 'Firefly Firmatta'. Todo lo que necesitas hacer para esto es ir a donde dice velocidad de transmisión y cambiar el número de 115200 a 9600. Esto permitirá la comunicación inalámbrica con el XBEE. Prestar atención a qué puerto serial utiliza, ya que debe coincidir con el puerto serie en saltamontes. Debe seleccionar el puerto serie haciendo clic en 'Herramientas' > 'Puerto serie' y seleccione el puerto serial que utilizar. Asegúrese de que su arduino está conectado a su computadora ahora y pulse el botón subir. Esto es algo que sólo necesita hacerlo una vez, entonces tu Arduino es listo para ir.
Los controles importantes de la escritura de los saltamontes están a lo largo del lado izquierdo. El puerto serie y los tensores boolean escritura Uno deben establecerse en true para que el script trabajar. Para cambiar algo como verdadero o falso, simplemente haga doble clic. Para cambiar el texto, solo haz doble click y para cambiar un número en el cursor número, puede haga doble clic en y escriba un valor o se pueden mover con el ratón.
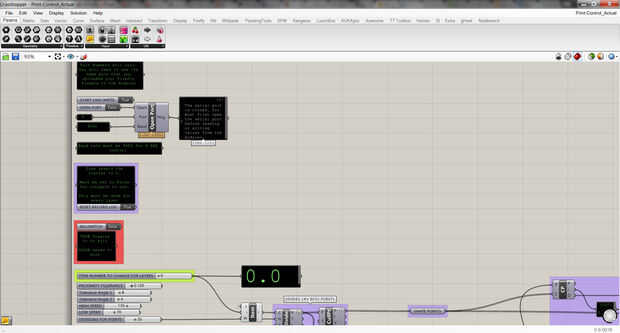
Para cada capa, tienes que cambiar el valor de capa en el control deslizante en la burbuja verde. La tolerancia de proximidad es ajustable, es qué tan cerca el robot llega a un punto antes de que desencadena el siguiente punto. Una vez que el robot alcanza la tolerancia ángulo 1, frena una de las ruedas es el valor de velocidad baja, mientras la otra rueda a alta velocidad. Una vez que alcanza la tolerancia ángulo 2, todas las ruedas avanzar a gran velocidad. Todos estos valores se pueden ajustar, sin embargo la baja velocidad nunca debe descender por debajo de 60, ya que es límite del motor. Podría tratar y caer bajo a ver que pasa! Las divisiones de la curva deben ser una cuenta más alta de la división de grandes curvas, y una división más baja para curvas más pequeñas, usted tendrá que ajustar a medida que avanza.
El killswitch existe sólo en caso de que algo va mal. Cambiar a true para desactivar todos los sistemas. Configurar lo XBEE y la Re









")
")
")

