Paso 4: Máquina coser carne (filas y columnas conector)






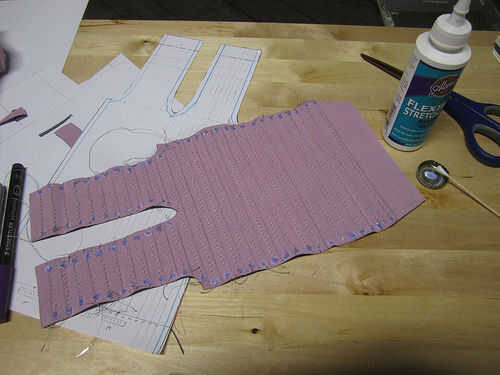
Configurar su máquina de coser para coser una puntada en zigzag que es de aproximadamente 4mm de ancho y 4mm de longitud. Coser las columnas en el lado de la tela del neopreno del primero y luego coser el-conectar-filas de la columna en el lado de goma del neopreno. Ver plantillas para más detalles.
Cuando las columnas desde un extremo de la tela y coser a la otra. Inmediatamente usted puede cortar el hilo corto y no necesita doble vuelta sobre sí mismo para evitar deshacer, como recomiendo usar pegamento en todas las terminaciones para evitar que el hilo se deshilache.
Una vez que todas las columnas son cosidas, volver atrás y coser las filas que se conectan desde cada columna al base final de la manga. Comenzar a coser el final de la columna de la traza y coser una puntada en zigzag (éste puede ser más estrecho, que se extiende muy bien con el neopreno) hasta 1 cm más allá de la primera columna, luego (sin quitar la tela de debajo de la aguja!) cambiar la configuración de la máquina de coser una puntada recta y continuar a coser a la conexión en la placa de circuito perforada. Ver el siguiente video para obtener más información.
Porque va conectar ambos extremos de estas filas Asegúrese de mantener ambos largo (por lo menos 10cm!). Y fuera del camino cuando costura anterior filas así que como para no atrapar suelta hilo conductor termina debajo de la puntada, como esto puede separar y en el peor de los casos significa que usted necesita para cortar ese hilo corto y volver a conectarse con un nudo o varios puntos de sutura (que es molesto).
Video
PRUEBA!
Después de coser todos sus rastros, sacar un polímetro y medir continuidad. Medida de conexiones no deseadas entre todas las columnas, filas de conector de todos y luego entre columnas y filas de conector. Si encuentras una mala conexión, usted quiere encontrar exactamente donde es y solucionarlo inmediatamente antes de continuar al siguiente paso. Esto podría involucrar a deshacer la columna o fila de conector y volver a coserlo.
")

")








)")

