Paso 3: Hacer las plantillas y preparación de materiales
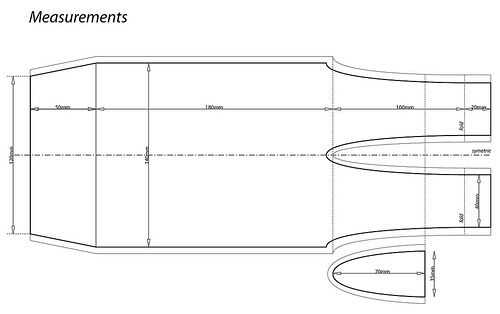
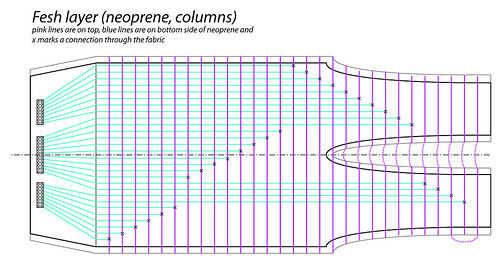
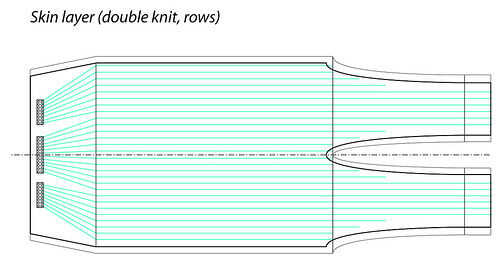

El tamaño A3 siguiente PDF contiene plantillas para las capas de carne, piel y piezorresistivo. Estas plantillas pueden imprimirse 1:1 y transferidas directamente a los materiales. Indican el espaciamiento de la fila o columna y cuentas, así como cómo las filas y columnas conectan eléctricamente al resto del circuito.
Porque rSkin es hecho a mano, es altamente personalizable y usted puede realizar cambios en las plantillas para incorporar personalizaciones, mejoras o ajustes.
Descargar plantilla de A3 (PDF) >> https://github.com/iandanforth/rSkin/blob/master/pdf/rSkinA3.pdf
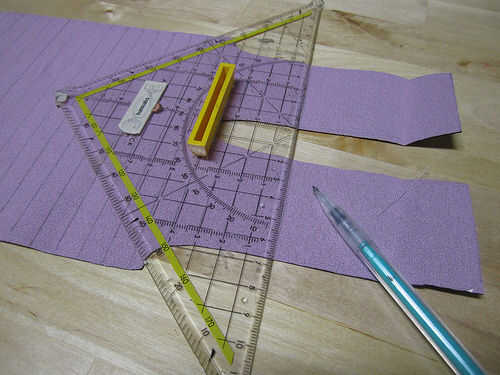
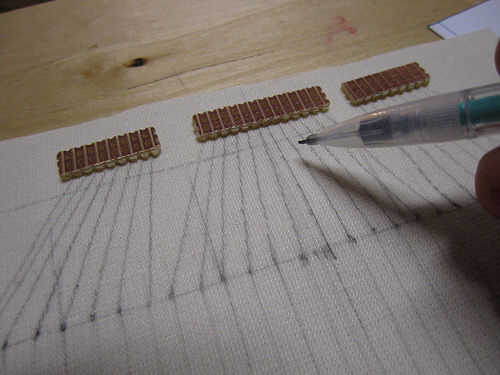
Las mediciones en la plantilla PDF indican distancias para costuras en cm. Tienes que añadir un margen a esto, dependiendo de cuánto su costura cómoda con. Normalmente añadir aproximadamente 5mm, que se indica en la plantilla como un contorno adicional. Después de cortar las formas de los materiales, también traza sus filas y columnas, así como sus conexiones a la placa de circuito perforada (perfboard). Para hacer decisiones sobre los materiales utilice un lápiz de mina blanda o comprar a tela, tiza o marcadores.
Razones para modificar las plantillas:
* Ajuste
Las plantillas aquí adaptadas a la elasticidad (elasticidad) de los materiales específicos que he utilizado (véase paso 2). Si está utilizando diferentes materiales, desea para asegurarse de que la anchura y la longitud de estas plantillas trabajará para usted. Si el brazo robot es más pequeño o más grande que el brazo que utilizamos (descrito aquí: http://makeprojects.com/Project/Build-an-Arm-for-Your-TurtleBot/1323/1) entonces usted tendrá que ajustar las plantillas. Desea que la piel se queda bien, pero también "relajado". No desea que la presión inicial de la piel se estiró sobre la piel para su gama de sensibilidad a la presión de salida max.
* Número de filas y columnas (superficie cubierta, resolución)
Si tienes que coser la piel más o menos apretado, para que su tejido particular ajuste el brazo del robot deberá ampliar o reducir el número de filas por consiguiente. Pero también puede aumentar o disminuir el número de filas o columnas para ajustar la resolución para adaptarse a las necesidades de su aplicación. Cuando se escala hacia abajo a los intervalos más pequeños, quiere asegurarse de que puede mantener una distancia de seguridad eléctrica entre rastros - que básicamente significa no tocar, o encontrar la manera de aislarlos.
* El espacio entre filas, columnas (resolución)
Si o no usted necesita ajustar el contorno de la piel para el brazo, usted puede aumentar o disminuir el espaciado de las filas (y columnas) para que coincida con su resolución deseable. Parte de la razón la versión de rSkin documentado a través de este Instructable es una red de 28 x 28, era para ahorrar en tiempo de producción. Ideal me parece un 0,3 o espaciado de 0.5 mm ideal para «muy alta resolución». Aunque espaciamiento ideal depende mucho de los tipos de objetos está interesado en detectar. Si usted quiere detectar la presión de los dedos tocando la piel, entonces no tiene sentido ir debajo de una cierta resolución porque la punta de cualquier dedo es ya un cierto tamaño. El espaciado de filas y columnas también depende de los sustratos base y posiblemente otra presión distribución de los materiales utilizados para hacer la piel. Materiales finos contienen la presión a las áreas definidas, materiales blandos distribuyen la presión para que filas y columnas.
* Ancho de filas, columnas (sensibilidad, resolución)
Otra cosa a tener en cuenta son los anchos reales de sus filas y columnas. En la versión descrita aquí las filas y columnas se cosen con hilo conductor con una más o menos 4 mm ancho puntada. La puntada para zigzag hace los rastros elástico, que es esencial ya que las mismas son elásticos y los rastros necesitan estirar con ellos. El patrón de zig-zag también actúa un poco como una curva de llenado de espacio, que reduce al mínimo la conductividad, pero algo uniformemente cubre un área específica (anchura del rastro). Mientras que los escogí coser una puntada en zigzag para cubrir al menos algunos ancho, estoy seguro que hay otras formas de crear estos rastros conductores elásticos que son más robustos.
-Nota: el diseño actual es 28 filas de circunferencia, donde cada fila es separada 5mm aparte (circunferencia total = 14cm), mientras que las columnas están espaciadas 1cm, cubriendo una longitud de 28cm. La razón para el espaciamiento de que las columnas más aparte tenía dos razones. La primera fue porque cada columna debe conectarse eléctricamente a un punto central (uno de los extremos de la piel), y en este diseño estas conexiones fueron cosidas en la parte posterior de la tela, que era coincidentemente mitad de ancho (filas) como era amplia (columnas), por lo que estas conectando las filas que llevan a cada una de las columnas fueron separada 0,5 cm de separación que se consideró una distancia de espacio seguro para el riesgo de evitar indeseables interconexiones. La segunda razón fue simplemente para reducir el número de conexiones que necesita para ser cosido para ahorrar tiempo en la producción de.
")

")








)")

