Paso 6: Instalación de Radio y uso y seguimiento de cabeza!

Por favor, consulte los cuadros de ajustes de radio exacto. Voy a explicar aquí lo que cada uno hace, pero la configuración actual será en las fotos. Voy a explicar en sets de dos imágenes pero si es molesto, me avisan en los comentarios y puedo cambiarlo. Sólo tenía más sentido para mí como escribí esto.
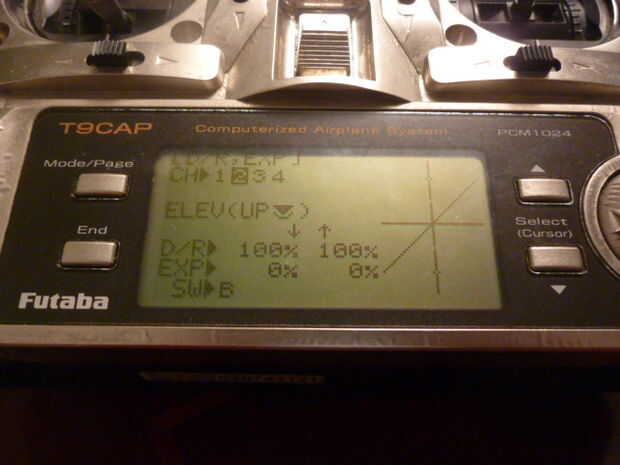
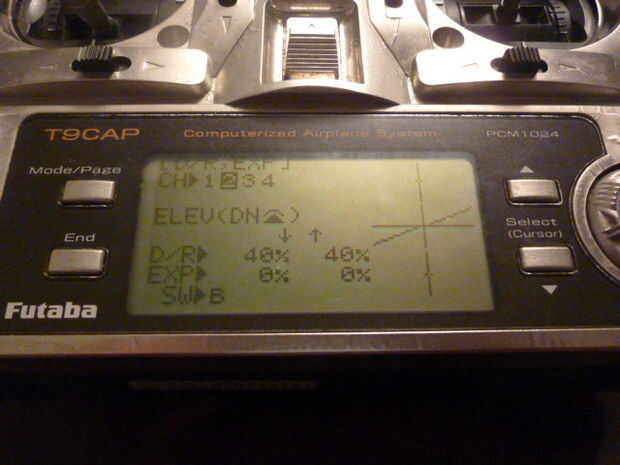
Las dos primeras imágenes son para controlar la configuración de aceleración máxima. Con el interruptor B (adelante del cuerpo), obtendrá el acelerador a fondo. Con ella hacia abajo, corta gas al 40%, muy útil para mantenerte de conducir demasiado rápido. Si tienes un repuesto 3 posición (interruptor C en esta compilación), realmente puede conseguir tres posiciones diferentes del acelerador!
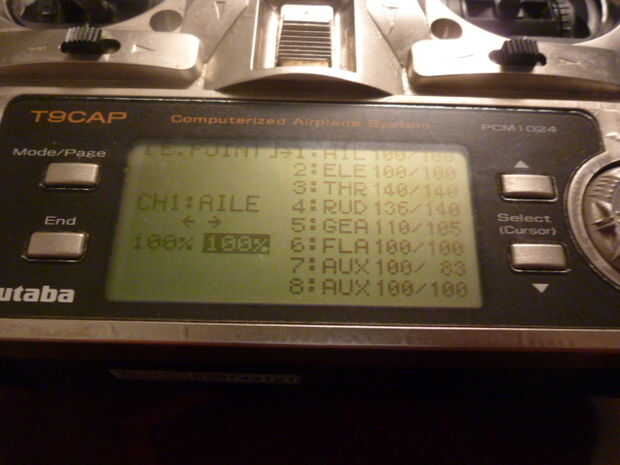
Las dos siguientes imágenes son el punto final y ajuste los ajustes. El punto final solo cambia el recorrido de tus servos. Por ejemplo, el servo de pan de la cámara mueve 45 grados a la izquierda y derecha para un total de 90 grados. Cuando el ajuste de punto final está en 100/100, obtienes el 90 grados izquierda y derecha. Si se reduce el punto final a 50/50, que cambia el movimiento del servo tan sólo viaja 45 grados izquierdas y derecha para un total de 90 grados de movimiento.
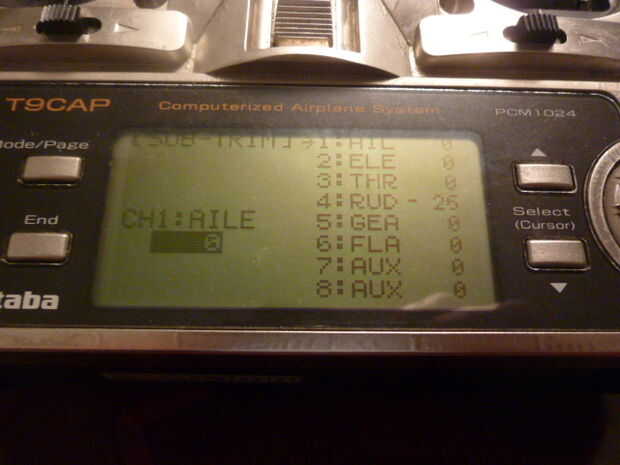
El sub-trim es sutil. Los interruptores de ajuste de la radio le permiten cambiar la moldura como fly/drive. Por lo general, si requiere más de un par de clics de ajuste, entonces lo que hacen es ver donde el cuerno y el brazo del servo, ocupa el guarnecido de nuevo a 0 y luego sacar el brazo de cuerno y probar y manualmente ponerlo donde debe estar. Una vez que esté lo más cerca posible, luego ajustas el sub-trim por lo que es donde debe estar. Luego tienes gama ajuste completo y debe estar en 0 trim.
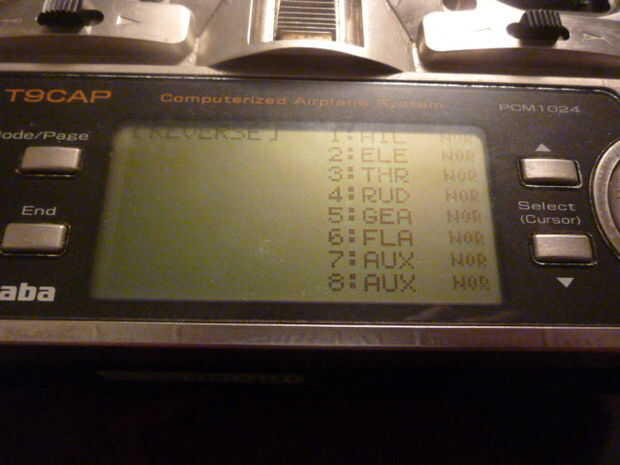
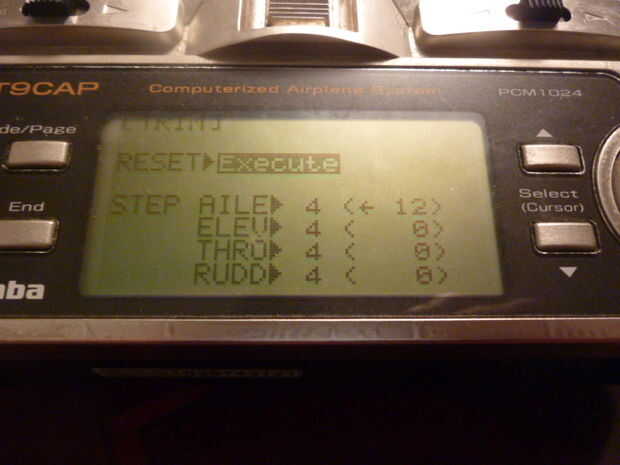
Las dos siguientes imágenes son para inversión de servos y recorte. Para la configuración usando los servos en el carro, todos los ajustes de inversión deben ajustarse a la normalidad. Esto va a cambiar si es necesario cambiar un servo y lo haces con uno que no es idéntica a la que va a quitar. En algunos casos, el servo se mueve en la dirección opuesta respecto a la anterior. Eso sucede debido a cómo el fabricante hace que el servo. Cambiar la configuración aquí. Si utiliza el equipo que he esbozado, estos valores deben ser los correctos, aunque después de tres camiones diferentes, podría haber un ajuste que he cambiado sin darme cuenta.
La pantalla de ajuste le permite ver los ajustes actuales en la radio. En este caso, el número 4 significa cuánto cada clic moverá el valor de ajuste. El número () es el número a la izquierda multiplicado por cuántos clics que ha realizado. En este caso, tuve que dar 3 clicks a la izquierda para obtener mi carro conducir recto. Recuerde, Trim y Sub-Trim son similares pero dos configuraciones diferentes.
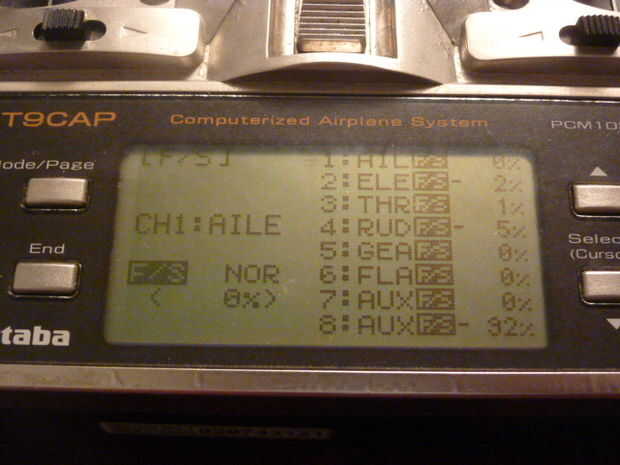
Las dos siguientes imágenes son para la configuración a prueba de fallos y asignaciones de interruptor de canal. Si alguna vez ejecuta fuera del alcance o apaga la radio, este es el valor predeterminado a que todos los canales se van. Los ajustes más importantes aquí son para el acelerador. Asegúrese de que el ascensor (canal 2) a prueba de fallos es correctamente con el palillo en la posición central. No quiero seguir yendo si pierde señal!
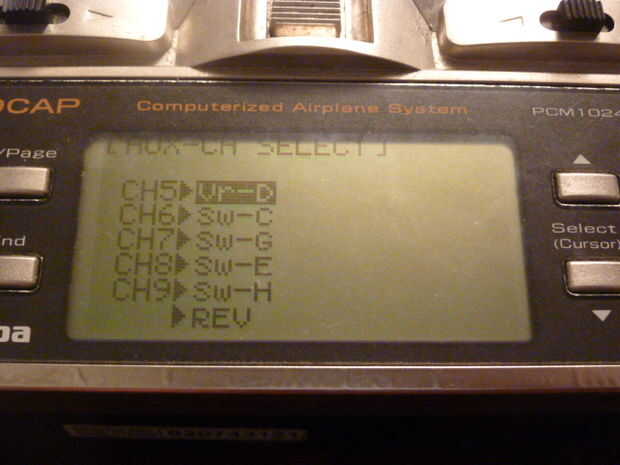
El menú Aux Ch le permite seleccionar qué interruptor, perilla o control deslizante controla cada canal de 5 a 9. Si empiezas a jugar con esto mientras el carro está encendido, potencialmente podría causar algunos daños como usted a desplazamiento a través de diferentes switches si decides cambiarlo. Cada uno que cambia está en una posición diferente por lo que si se desplaza a través de, el servo en canal se puede atascar o tienen problemas. No está garantizada, pero sólo tenga cuidado y asegúrese de que el carro está apagado. Para esta build, canal 5 y 7 son los únicos que tienen que ajustarse como se indica y los otros pueden ser diferentes.
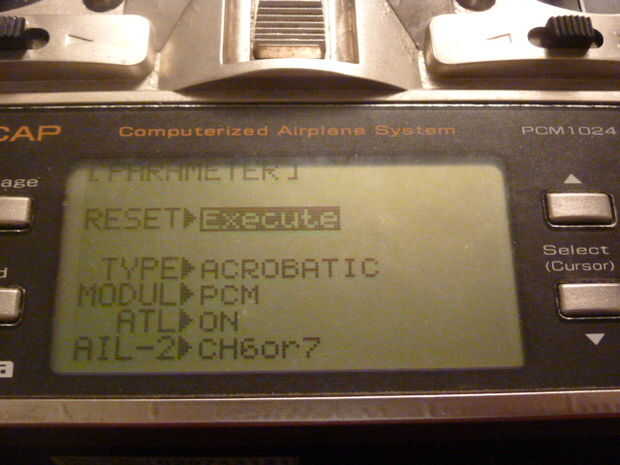
Las dos imágenes del finales son el menú parámetros de la pantalla y el entrenador. La pantalla de parámetro es para la configuración de radio básica si quieres avión o heli programación. Para vehículos de tierra, sólo tiene que utilizar la configuración de avión (acrobático).
El menú de entrenador permite que las señales de los dispositivos conectados al puerto de entrenador en la parte posterior de la radio controlar ciertos aspectos del control. Si usas un headtracker para control pan/tilt, quieren canal 4 y 5 para poder ser controlado por un dispositivo externo que está conectado al puerto trainer. Se permite que las señales pasar tirando interruptor F hacia tu cuerpo. Si decides utilizar un headtracker, recomiendo de Flytron.
Tomar nota de conducir unos consejos a continuación.
Para conducir el camión, utiliza el stick derecho. Moverla hacia arriba se mueve hacia adelante. Movimiento hacia atrás se ponga el freno. El Traxxas ESC sólo le permite ir en sentido inverso después de freno y han dejado. Básicamente, si quieres mermelada a la inversa, tiene que mover el palo hacia atrás rápidamente dos veces pero no es bueno para la transmisión. El ESC no impide ir de atrás a remite. Ten mucho cuidado de hacerlo porque es muy fácil para una rotación y que acabará con el carro hacia abajo. También he encontrado así que con la suspensión más rígida, si estás en una superficie de alta tracción, como el asfalto, si le das acelerador de una parada con el interruptor B en la posición de arriba, que puede estallar una rotación así que ten cuidado. Utilice el interruptor B para bajar la tasa del acelerador si es necesario. Antes de tomar hacia fuera, asegúrese de calibrar el CES al nuevo radio. Las instrucciones para las calibraciones se pueden encontrar aquí en la Web de Traxxas.
Con el interruptor G en la posición lejos de usted (hacia la tierra), el carro debe estar en marcha. Cuando se mueve el interruptor a la posición media, el camión cambia de puesto en marcha baja. Nunca cambiar engranaje mientras se mueve. Usted puede si desea pero después que un par de veces, usted es probable que arruinara la transmisión. Siempre puede fijar las piezas, pero se requiere mucho de desmontaje si usted no ha notado! Si no cambiar de marcha con desplazamiento, mover hacia adelante o hacia atrás a un bache y debe cambiar.
Cuando se mueve el interruptor a la posición más cercana a usted, estará en marcha baja y bloqueará la parte delantera y traseros diferenciales a la vez. Otra vez, nunca cambie mientras usted se mueve. Igual que la transmisión, puede a veces pero te soplarán hacia fuera si lo haces mientras se mueve mucho. Esto sólo debe ser utilizado cuando se atranca o no tiene bastante sobre algo. Todos los 4 neumáticos se moverán a la misma velocidad. Tan pronto como un obstáculo, desbloquearlas y su radio de giro es horrible si no hay tensión en el tren de la impulsión.
Estoy agregando cabeza seguimiento aquí porque el sitio tenía problemas conmigo agregar pasos así que aquí está la sección de seguimiento de cabeza!
La cabeza de este paso es el DT - 3K de www.flytron.com. Es el enlace directo aquí. Todas las instrucciones son para la Futaba 9C que es una parte de este Instructable. Algunos de los conectores pueden ser diferentes para su radio. La radio debe tener un entrenador apoyado enchufe en la parte posterior.
En primer lugar, enchufe en el rastreador de cabeza a la parte posterior de la radio C 9. Esto debe hacerse antes de encender el transmisor. Para que lo configure por primera vez, necesitará mantenga pulsado el botón al encender la radio. Después de dejar ir, el LED parpadeará 10 veces muy rápidamente.
Luego tendrás que soltar el botón y el LED comenzará a parpadear. Mantenga presionado hasta que la tiene parpadear 4 veces y dejar ir. Deberá parpadear 10 veces rápidamente otra vez para mostrar que se acepta el ajuste. Básicamente usted programado para decir que el canal de Panamericana es el canal 4 y la inclinación es de 5. Si lo tienes en dos otros canales, deja ir cuando llega a su canal de servo pan. Usted tendrá que tener sus conexiones tal que el servo del pan es el número de canal que es uno más bajo que el servo tilt (pan en 4, incline sobre 5).
Luego mantenga pulsado el botón nuevamente hasta que parpadee dos veces y dejar ir. Va a parpadear 10 veces rápidamente otra vez. Esta opción inserta básicamente las señales para la radio Futaba 9c. Si tienes una radio diferente, asegúrese de consultar el manual para el rastreador de cabeza para su configuración particular.
Las dos partes son determinar la dirección correcta del movimiento de pan/tilt. Para mi setup, tengo el cable del tracker cabeza hacia adelante. Básicamente, la caja se sienta sobre mi cabeza y el cable sale hacia el frente. Con esta configuración y los servos que tengo, usted querrá soltar el botón y suelte cuando parpadee dos veces. Luego mantenga pulsado el botón otra vez y soltar después del primer parpadeo. Que establece el movimiento de la dirección de servo adecuado para el servo pan primero y luego el servo tilt segundo. Si no se mueve lo que necesita, trate de dejar ir después de 1 parpadeo de pan o 2 parpadeos para inclinación. Sólo una advertencia! Si necesita volver a hacerlo, tienes que empezar por apagar la radio y a partir de programación hacia arriba otra vez. Sí, es una pena pero vale la pena una vez que obtenga trabajo.
Ahora que su principal perseguidor está configurado, puede utilizar el interruptor de entrenador en la radio y hacer el procedimiento de calibración. Esto supone que usted hizo la instalación de radio en los pasos anteriores cuando se configura todo como se muestra en las fotos.
Para calibrar, debe sostener el interruptor de entrenador en su radio en la posición on. Mientras que hacia al norte o al sur, presione el botón en el rastreador de cabeza. Luego mueva el rastreador de cabeza a la izquierda, derecha, luego hacia arriba y hacia abajo como cuando usas. Establece las posiciones máximas y mínimas de los sensores en el tracker. Idealmente, usted querrá hacerlo mismo con el rastreador montado en su sombrero. Pulse el botón una vez más después de que hice esos pasos y usted debe ser bueno para ir.
Para usar el rastreador de cabeza, usted debe estar orientada hacia sur o norte magnético. Aunque esto puede ser considerado una desventaja para otros seguidores, este es muy confiable y realmente me gusta y agrega al realismo.
El siguiente paso en este Instructable es sólo para los que quieren vista unidad primera persona (FPV). No necesitas hacerlo usando lo que has hecho hasta este punto, pero que es del punto de la construcción. Conseguir una licencia de radio de jamón puede llevar mucho tiempo dependiendo de tus conocimientos de electrónica pero es una habilidad útil para tener. Si quieres ir en, y luego continuar con el siguiente paso! Si no tienes una licencia, entonces súbete hacia fuera y hacer algunos videos!











")
")
")