Paso 9: Planificador de misión y parámetros

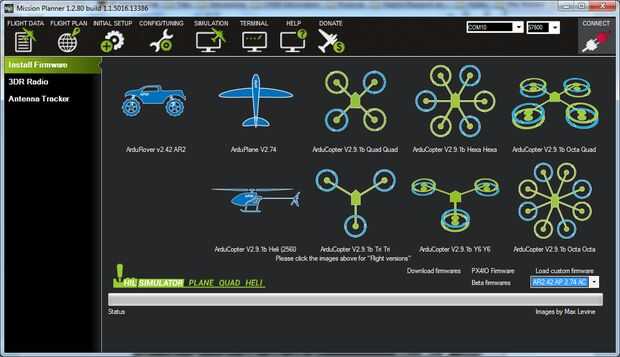

Descargar el archivo MSI de planificador de misión (MP) de http://ardupilot.com/downloads/?category=4 e instalar el programa. Este programa se utilizará para cargar el firmware en la APM y la pantalla principal puede verse en la primera imagen.
Nota: Es sólo para sistemas Windows, pero están trabajando en un nuevo programa que será cruzado compatible con Linux y Mac como en Windows.
Usted desea configurar su sistema de radio telemetría. Para obtener instrucciones con respecto a eso, aplazar a la Página Web de la documentación apropiada como no quieres ensuciar para arriba. Aquí está el enlace: http://plane.ardupilot.com/wiki/common-using-the-3dr-radio-for-telemetry-with-apm-and-px4/
Una vez instalado el programa, conectar el APM a la computadora usando el cable micro del USB que vino con él. Haga clic en "Seleccionar Firmware anterior" en la parte inferior derecha. Haga clic en la parte superior uno con AR2.42 en él porque es la versión que se utilizó para esto. Completamente voy a actualizar a la más reciente 2.43 y tiene mejor código de navegación pero hasta ahora son mis parámetros de 2.42. Una vez, el icono para el rover debe cambia y el texto debe ser "ArduRover v2.42 AR2". Haga clic en él y se cargará el firmware a la APM.
Cuando se carga el firmware correctamente, debe conectar a la APM por el planificador. Esto puede hacerse ya sea por mantener enchufado mediante el cable USB o mediante el módulo de telemetría y la conexión a través de eso. Si es tu primera vez, necesitará configurar el módulo de telemetría primero antes de que se puede conectar con él. Asegúrese de seleccionar el puerto COM correcto en la parte superior derecha del panel de administración, deje la velocidad en baudios tasa a 115200 y haga clic en conectar. Al principio, probablemente buscará MavLink mensajes y luego comenzará a cargar los parámetros. La primera vez que conecte, debe formatear el dataflash en la unidad y se llevará unos pocos minutos. Simplemente dejarlo ir y esperar. Si no ves ningún cambio después de 5-10 minutos, reinicie el APM y se debe conectar. Tuve un problema la primera vez pero después de reiniciar, funcionaba bien. Mi uno no me da problemas.
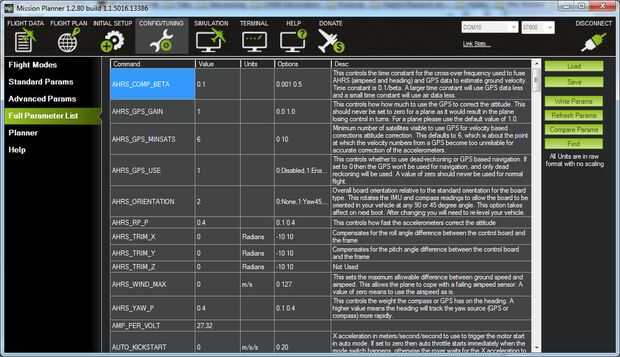
A continuación, cargar los parámetros del archivo de parámetro a este paso para que usted consiga la mayoría de la manera allí. Si está utilizando la acción Traxxas dirección ESC con una Futaba, servos y radio y también tienen el APM montado lateralmente con la flecha a la izquierda del camión, estos parámetros deben ponerte en marcha rápidamente. Tendrá que calibrar su radio pero vamos a ir por eso. Aunque como usted tendrá que ir a través de cada paso, si tienes problemas de seguir leyendo.
Para cargar los parámetros, debe ir a la pestaña CONFIG/TUNING y luego haga clic en la "lista completa de parámetros" en la izquierda. Entonces los botones a la derecha dan una opción para cargar un archivo. Asegúrese de descargar el archivo de parámetros en este paso. Después de descargarlo, debe cambiar la extensión de archivo de .txt a .param. Esto tuvo que hacerse para que se sube a la página web como que no acepta un archivo .param. Una vez cargado, puede leer los parámetros. Una vez has explorado a su contenido de corazones, luego escribir los parámetros en la APM.
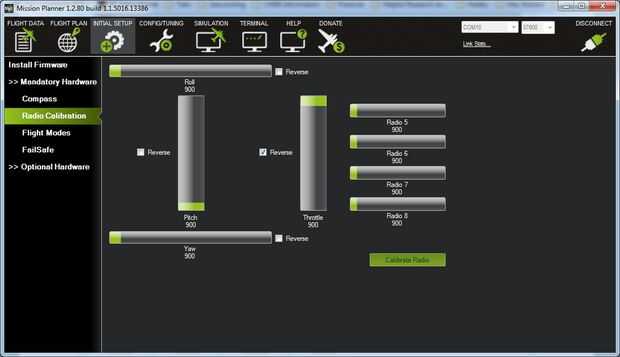
Una vez que se establecen los parámetros, asegúrese de ejecutar la calibración de radio antes de hacer otra cosa y establecer los modos apropiados en el tercer canal en la radio. La calibración de radio está bajo la ficha de configuración inicial hacer seguro su ESC se apaga pero que el receptor y el APM están encendidos desde el BEC externo. Haga clic en "Calibrar la Radio" y luego mover la palanca derecha a todos los extremos y luego mueva el interruptor para el modo de obtener las posiciones de interruptor.
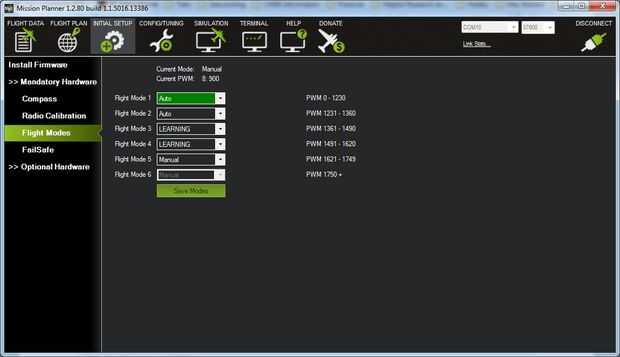
Después de tener la radio calibrada, querrá configurar adecuadamente los modos. Con el conmutador en una posición, debe demostrar en vuelo modo 6, que es el modo MANUAL y podrás controlar el carro como lo haría normalmente. Al mover el interruptor, debe cambiar al modo de vuelo 1 y que debe ser establecido en AUTO.
Finalmente, usted querrá asegurarse de que la brújula esté configurada correctamente. En la pestaña de configuración inicial, hay una sección de "HARDWARE obligatorio" y debajo de ella, la brújula. Lo único que necesita hacer es asegurarse de que está activada y que la orientación se establece en Manual: ROTATION_YAW_180. Eso es si instalar como lo hice con la flecha a la izquierda del camión.
Ahora usted está listo para plan de puntos de referencia y prueba y misión AUTO! Voy aplazar nuevamente la documentación del ArduPilot como hacen un buen trabajo. Aquí está el enlace: http://plane.ardupilot.com/wiki/common-planning-a-mission-with-waypoints-and-events/
Para la solución de problemas generales, probar estos cambios como su configuración puede ser ligeramente diferente a la mía.
Si su carro va hacia atrás en el AUTO: haga clic en la casilla de verificación inversa para la válvula reguladora en la calibración de la radio.
Si tu carro las serpientes van hacia adelante y hacia atrás a un punto de referencia: Haz clic en la casilla de verificación inversa para el rodillo en la calibración de radio.
Si su carro va en una dirección diferente de lo esperado, cambiar la orientación brújula bajo obligatorio hardware en la pestaña de configuración inicial. Éste es más difícil de rastrear debido a los errores en el posicionamiento GPS. Si no tiene una buena cerradura a veces, va a ser apagado un poco y parece que va mal. Vas a tener que probar unos cuantos diferentes orientaciones pero hay solamente 4 a elegir para desvío que son separadas 90 grados por lo que debería ser obvio que es correcto rápidamente.
Disfrutar de las vistas mientras su piloto automático te lleva en un coche!











")
")
")