Paso 4: Configuración de Pan/Tilt y montaje








Para el resto de ustedes, esta es la parte que estaba originalmente temiendo porque nunca había hecho un soporte de la cacerola/la inclinación antes. Hacer la cacerola/la inclinación de la cámara da la apariencia de Joe mueve su cabeza como él en los videos. El pan es fácil de hacer. La inclinación, que no había visto una buena manera de hacerlo sin comprar un sistema costoso de pan/tilt o tener que hacer un montón de trabajos a medida. Opté por este último ya no puedo justificar comprar algo que caro cuando puedo hago que en mi propia con algún esfuerzo.
Los ServoBlocks son, en mi opinión, la mejor opción para un sistema de bandeja en este carro y usted verá por qué. Van muy bien juntos y trabajar con servos Hitec o Futaba tamaño estándar. Si usted tiene un servo Hitec, usted querrá asegurarse de comprar la versión de Hitec de la ServoBlocks en lugar de lo que tengo en la lista de materiales. Tenía unos servos Futaba S3004 de repuesto desde hace un tiempo, así usé con el ServoBlocks.
Voy a explicar unas cosas aquí y luego dejar las imágenes hacen el resto de la obra con notas en cada fotografía.
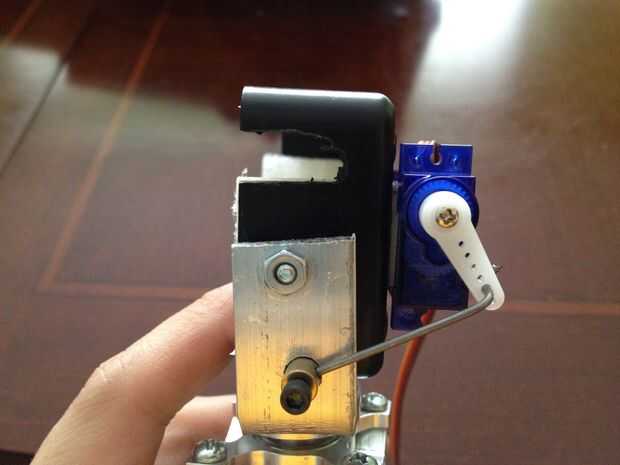
Dependiendo el carro que tienes, o tienes una tapa de tipo rodillo jaula o a tener más de un tipo Bronco, parte superior cerrada. Si tienes la parte superior de la barra de rodillo, puede seguir la mayoría de los cuadros como se muestra sin mucho problema. Si tienes la tapa de tipo Bronco, entonces usted necesitará poner el servo de inclinación a la derecha de la caja del proyecto y hacer los agujeros correspondientes en el metal como el servo golpeó el lado de la camioneta si es en el lado izquierdo.
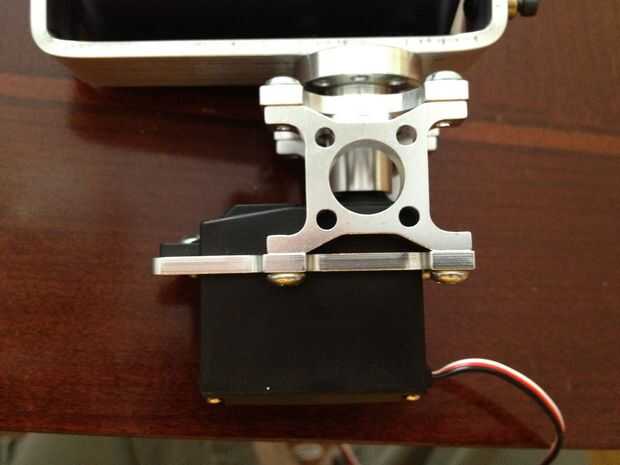
Cuando se pone el conjunto de inclinación en la ServoBlocks, usted querrá que la spline en el servo esté a la derecha si usted está buscando en la cacerola/la inclinación desde atrás.
Si sólo vas a hacer una configuración de pan, entonces será muy fácil. Solo pegamento o tornillo de abajo de la caja del proyecto a la parte superior de la ServoBlock y listo. Si desea que la capacidad de mirar hacia arriba o hacia abajo, es mucho más trabajo. Lo que tienes que hacer es tomar ese pedazo plano de aluminio y cortar a la longitud correcta para encajar alrededor de la caja del pequeño proyecto. Ser seguro que usted cortó él tiempo suficiente para que deje suficiente espacio entre la caja y el aluminio por lo que puede inclinar un poco hacia abajo. Al hacer la medición, usted querrá Asegúrese de que dejar suficiente espacio para las cabezas de los tornillos 6-32 cuando la caja está inclinada para arriba un poco. Una vez más, si tienes la parte superior de la barra de rodillo, ese espacio no importa tanto como usted puede tener más espacio entre la caja y el aluminio. Si tienes la tapa de Bronco, entonces necesita tener cuidado en las medidas aquí. Ver la sexta y la segunda a la última foto para hacerse una idea de lo que quiero decir. Tendrás que hacer una modificación a la parte inferior de la caja de corte espacio para asegurarse de que borra las cabezas de los tornillos. Si la haces más alto en su lugar para despejar la cabeza sin tener que modificar la caja, luego la parte superior de la caja llegará a la parte superior del carro y usted no será capaz de inclinar hacia arriba o hacia abajo. Es un ajuste apretado pero te funciona bien.
Al llegar el aluminio cortado a la longitud adecuada, necesitará 5 agujeros en el aluminio. Dos se utilizan para montar el soporte en el centro de ServoBlocks. El centro ya es rosca 6-32 tornillos para hacen el agujero de ese tamaño y asegúrese de que alinee con el eje. Una vez que tengas que hacer, a montar en el sistema de pan bastante fácilmente. También tendrá dos agujeros en lados para el cuadro de proyecto montar por lo que puede girar sin resistencia de la oposición. Por último, es necesario un agujero para poner la varilla de empuje, por lo que puede inclinar la caja con un servo. Este agujero, idealmente, debería ser en el lado derecho de la Asamblea de la inclinación.
Siga las notas en el resto de las fotos y podrás conseguirlo hecho. Es más fácil de explicar en cada fotografía.
Una vez instalado, usted querrá obtener a Joe en su lugar. Para preparar el Joe, tendrás que sacar la cabeza por desgracia. Si usted compró la versión de Kung-Fu grip, hay un gancho conectado a la cabeza que mantiene la tensión en el resto de sus piernas y brazos movibles. Usted necesitará enganchar en su pecho para mantener todo apretado. Si tienes un Joe regular, es más fácil de tratar con esa parte. Una vez que su cabeza está apagado, solo a pegar su mano izquierda en el volante y vas a tener la muñeca conduciendo el camión!
Para proteger a Joe o Barbie en sus viajes, usted necesitará mantener en su lugar. ¿Recuerde que en el paso 3 donde hiciste los agujeros en el plástico interior de los cinturones de seguridad? Bueno, esto es donde usted debe poner en su lugar. Es especialmente importante para Joe porque él tiene que estar lo suficiente que la soporte de inclinación borra la parte superior de su pecho cuando la Asamblea sartenes izquierda y derecha.
Estás apagado para el siguiente paso!











")
")
")