Paso 5: Conexiones y montaje



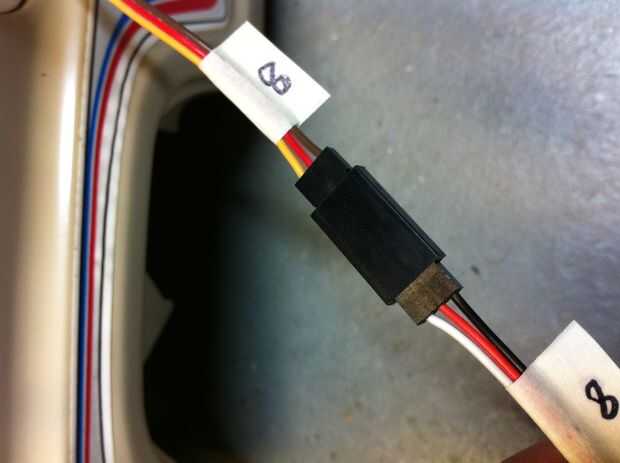


Usted también querrá quitar la caja del stock receptor resistente al agua y sacar los cables de servo si usted está planeando sobre la instalación más complicada. Si estás haciendo la versión más simple sin el GI Joe o volante movible, entonces dejarlo como está. Cuando retire cada cable, marca con el número del canal que fue enchufada para que sepa la función del servo. Cinta adhesiva y un rotulador funcionan bastante bien. Los cables de servo y los canales van a son los siguientes:
1 - Dirección servo (hay dos de ellos)
2 - ESC (aceleración)
3 - servo de cambio
4 - delantero servo diferencial
5 - servo diferencial posterior
Depende si compraste las extensiones de servo y cables Y que se relaciona o no, que tenga diferentes colores cableado de los cables que lo que ves en los cables de servo. Esto es sólo la falta de un estándar común entre algunas marcas de fábrica. En general, el cable de tierra es negro pero también puede ser marrón dependiendo de la marca. Red siempre es energía. El cable de señal puede ser blanco, amarillo o naranja. Cuando hagas todas las conexiones de servo, sólo asegúrese de negro se va a negro/marrón y todo lo demás debe alinearse bien. Para una explicación más detallada, usted puede leer sobre los tipos de conexiones en ServoCity.
Para las conexiones, usted necesitará tomar un cable de servo Y y Conecte ambos servos del manejo de la Y. Entonces usted necesitará tomar otro Y cable y enchufe un servo diferencial y luego el inversor de servo en la otra parte del cable Y. Luego enchufe el otro servo diferencial el inversor del servo. Les tendremos tanto bloquear al mismo tiempo. Si usted desea controlar por separado y tiene un canal de repuesto, puede hacerlo sin problemas, pero es no cómo funcionará esta configuración. Dependiendo de donde usted decide montar el receptor, puede que necesite extensiones de servo. Poner en un extremo del cable Y para ahorrar el tener que utilizar muchas extensiones.
Con el módulo de Traxxas T-lock, que querrá conectar el servo shift (etiquetado como canal 3) en el 'A' puerto del módulo y luego el extremo del cable Y los diferenciales servos conectados a va al puerto del módulo 'B'. Luego use una extensión de servo en el otro extremo por lo que tendrás suficiente alcance para llegar al receptor. Esta parte eficaz qué es toma la señal del transmisor cuando el canal alcanza un cierto umbral, pasa el camión de alta velocidad a baja velocidad. Entonces cuando vamos al interruptor el resto del camino, bloquea las diferencias al mismo tiempo. Es una manera fácil de salirse con lo que solía ser controlada por los tres canales con un solo. No se puede ejecutar en alta velocidad con los diferenciales bloqueados e independientemente puede bloquear la parte delantera o traseros diferenciales pero es un pequeño dilema. Ejecuta en el engranaje de alta velocidad con los diferenciales bloqueados no se recomienda de todas formas como usted puede soplar hacia fuera y para usos generales, ambos diferenciales de bloqueo al mismo tiempo está bien.
El manejo servos conectados a un cable en Y y un extremo del cable tiene que ir al otro Y cable. El servo utilizado para mover el volante se pone en el otro lado del cable Y. Tendrás tres servos funcionando fuera de un solo canal con esta configuración. Al girar las ruedas, el volante seguirá ahora las ruedas.
Para el cable ESC, usted necesitará quitar el cable rojo del enchufe del servo. Usando un cuchillo de la manía, levante la lengüeta para el cable rojo y tire del cable hacia fuera. Generalmente usar cinta aislante negra para cubrir el perno sí mismo siempre que pueda utilizar más adelante. Algunas personas sólo cortan el cable rojo pero parece un poco desmedido. Lo que esto hace es que elimina el uso del BEC incorporado en la ESC. Para correr 5 servos en una acción Cumbre, funciona bien pero con el volante y pan/inclinación del sistema, está ejecutando 8 servos y posiblemente podría recalentarse el stock BEC. Usted usará un BEC externo en lugar de otro que suministrará más de potencia adecuada para tus servos.
Ahora estás listo para montar el cuerpo en el carro. Si has seguido las instrucciones hasta este punto y lo hizo probar algunos ajustes, entonces debe ir a. Estaba el cuerpo del carro en su lado en las ruedas mientras ejecuta todos los cables de servo a través del agujero en la pared vertical en la parte posterior del camión que debería haber hecho en el paso 2, cuadro 12. Una vez que las conexiones son a través de ese agujero, luego rodar el cuerpo sobre el camión. Asegúrese de poner los postes de soporte de cuerpo en el lugar correcto. Puede utilizar los pernos de montaje de cuerpo común para mantener en su lugar o utilizar pasadores de enganche más grandes para poder sacar rápidamente el cuerpo. De cualquier manera funciona. Usé más pequeños pasadores de enganche (utilice los pernos de cuerpo del cuerpo común) para mantener el cuerpo en el lugar mientras que usaba el cuerpo original post pasadores para sujetar el cuerpo con el chasis.
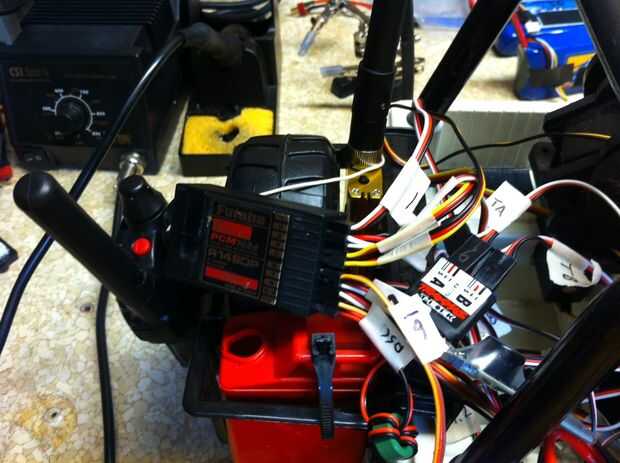
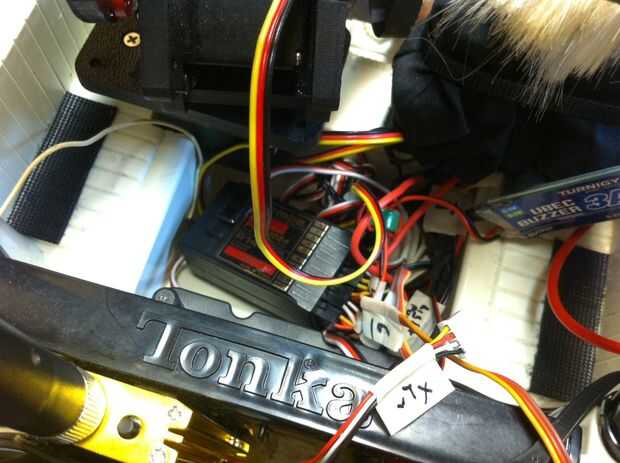
Una vez que el cuerpo se ha montado, ahora puede conectar los servos al receptor. Suponiendo que usted está usando un radio Futaba y un receptor, cable Y con los tres servos dirección en se conecta al canal 1. Si está utilizando un sistema Spektrum o uno que tiene palabras en lugar de números, conéctelo al AILE (para el alerón). Para el ESC, usted necesitará conectarse a canal 2 o ELEV (ascensor). Estos dos canales son en el palo derecho de un radio estándar y el razonamiento para poner la salida de la palanca del ascensor es que para que el ESC para calibrar correctamente, tienes que tener un palo que se auto centra. Si han tenido un vehículo Traxxas, necesitará asegurarse de volver a calibrar la salida como se indica en el manual de la ESC por lo que lee los valores PWM del receptor adecuadamente para la operación.
El servo de inclinación tiene una extensión de servo en él y se conectará al canal 5 o engranaje. El servo pan se conectará a la camilla del servo y luego el otro extremo de la camilla del servo se conectará al canal 4 o RUDD (timón). Se controlará su bandeja con su palo izquierdo. El pan centrará bien estar en canal 4. Inclinación será controlada por el desplazador en el lado izquierdo de la radio. Permanecerá en donde dejas el cursor pero también le permitirá moverse como desee. Conveniente ¿EH?
La razón que utilizamos una camilla de servo en el pan aquí es que las señales PWM estándar del receptor sólo mover el servo 45 a la izquierda o de centro de 90 grados de recorrido. Esto es aceptable para la mayoría de las cosas pero para esta aplicación, usted quiere ser capaz de ver de 90 grados a la izquierda y derecha por lo que puede "mirar ambas maneras" antes de cruzar una calle. Usted desea ajustar la camilla servo según el manual que viene con él. No voy a reinventar la rueda y escribir todos hacia fuera aquí en mis propias palabras como ellos es lo suficientemente bueno!
El módulo T-lock probablemente tendrá una extensión de servo y pasará canal 7 o 2 AUX (auxiliar 2). Salí de canal 3 y 6 (THRO y Aux 1) abierto para otros accesorios en el futuro como siempre diversión para instalar un interruptor para encender las luces de encendido/apagado, instale una bocina, o volumen para un sistema de altavoces.
Finalmente, usted necesitará conectar su UBEC al puerto Batt/Bind/datos darle un montón de energía en todos los servos como acción ESC no puede suministrar toda la corriente necesaria para tantos servos. El otro extremo de la UBEC se conectará al puerto de equilibrio de la batería del transmisor de video.
En este punto, usted puede proceder al siguiente paso!











")
")
")