Paso 6: La mano: conectar los dedos juntos


Cada uno de los dedos se conecta a su correspondiente agujero de perno en la ensambladura del carpo. Si sólo vas a compilar la mano, 1" largo 1/8" tornillos (6 x 32) funcionan muy bien, pero si usted está planeando en la construcción de la muñeca usted querrá utilizar tornillos de 1.5" para el puntero y las conexiones del dedo pequeño.
Una nota acerca de roscar: para estas conexiones, así como la mayoría de las otras conexiones de tornillo en el brazo, te recomiendo al menos una de las dos piezas de conexión debe tener un orificio roscado. Esta manera si las tuercas sueltas nada caerá (inmediato al menos). Cuando se imprime, los agujeros en la mayoría si no todas las piezas son sólo pequeños para enrósquelos conduciendo un perno a través de él. Alternativamente usted puede perforar un orificio que permite facilitar el montaje, pero ten en cuenta que una vez que perfore un agujero a un mayor tamaño no podrás pasarlo otra vez, al menos no tan eficazmente como antes. Los dos lugares que realmente recomiendo la perforación están en los dedos y en el agujero de perno de la muñeca de lado a lado en el cruce del carpo, que ayuda a reduce la fricción en las articulaciones.
Avanzando, si el dedo o el agujero de perno correspondiente en la Unión es roscado, asegúrese de colocar las piezas juntas como sea posible antes de enroscar el perno a través, como se muestra en el cuadro 2, de lo contrario probablemente necesitará reiniciar o destruir las roscas en el dedo para conseguir el perno a través de todo el camino. Apriete como sea necesario, pero dejar una pequeña holgura para que puedan difundir aparte el servo de propagación.
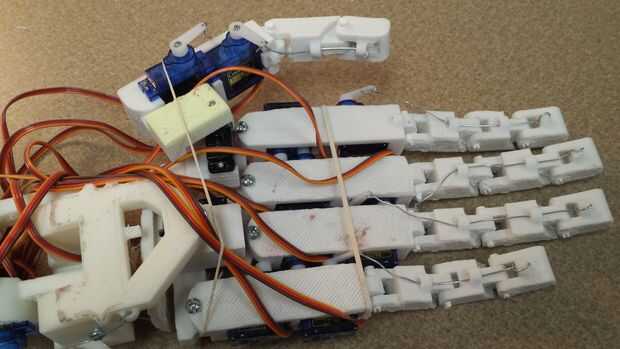
También, para evitar que los dedos extendiéndose demasiado en su propio, puede estirar algunas bandas de goma alrededor de la mano para seguir juntos. Esto es especialmente importante para el pulgar, que (en el diseño actual) sigue siendo un poco flojo.





")






