Paso 14: El controlador: cableado de los Servos

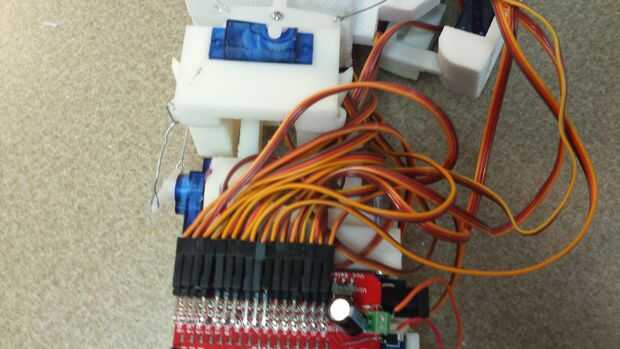
Este paso es fundamental para corregir la operación del brazo y le evitará tener que reescribir código innecesariamente. Deben conectar los servos al escudo en el orden mostrado en la primera foto (#15 es para el servo del antebrazo gire en la siguiente parte del Instructable). No debería ser ningún problema de longitud del cable, pero para estar seguro se puede colocar la mano de tal manera que todos los servos será lo más lejos del regulador como sea posible antes de enchufarlos. Si vas para la gestión de cable buena que también puede tratar de llevar todos los cables entre el pulgar y la muñeca como se muestra en el cuadro 2.
Y todo listo para empezar a moverse el brazo! ¡ Buen trabajo! Si quieres ir un paso más (Metafóricamente hablando) puede construir el antebrazo al codo conector en la parte 4 de este Instructable para permitir que su brazo a torcer y para asegurarse de que usted está al día cuando termino el codo.





")






