Paso 1: Diseño mecánico de Chefbot
En este paso, podemos ver un resumen del proceso de diseño de Chefbot mencionado en el libro.
El diseño del robot comienza a partir de un conjunto de requisitos.
Siguientes condiciones deben cumplirse en el diseño de robot.
Aquí están los requisitos
- El robot debe tener una disposición a llevar la comida y bebidas.
- El robot debe ser capaz de llevar una carga útil máxima de 5 kg.
- El robot debe viajar a una velocidad entre 0,25 m/s y 1 m/s
- La altura mínima del robot debe ser mayor a 3 cm
- El robot debe ser capaz de trabajar durante 2 horas continuamente
- El robot debe poder moverse y suministro de alimentos a cualquier tabla evitando obstáculos
- La altura del robot debe ser entre 40 cm y 1 metro
- El robot debe ser de bajo costo
Después de analizar y diseñar el requisito estamos llegando a la conclusión de que, después de parámetros debe ser en el robot.
Especificación del motor
- Coche robot: diferencial ruedas coche
- Velocidad Motor: 80 RPM
- Diámetro de rueda: 9 cm
Así que debemos diseñar un sistema de tracción del robot y comprar motores que se corresponden con estas especificaciones.
Siguiente paso es diseñar el chasis del robot.
Diseño del chasis del robot
Estamos tomando la arquitectura de capas 3-plataforma en este robot que es similar a Turtlebot 2.
He usado después de herramientas de software libre para dibujar y ver el diseño 2D y 3D del robot
- LibreCAD: LibreCAD es una aplicación de CAD 2D completa que puedes descargar e instalar gratis.
- Blender: Blender es la herramienta de modelado 3D gratuito y de código abierto.
- Meshlab: MeshLab es de código abierto, portable, y extensible sistema para el procesamiento y edición de estructurados mallas 3D triangular.
En Ubuntu que se puede instalar estas herramientas utilizando el siguiente comando
Instalar LibreCAD
Instalar Blender
Instalación de Meshlab
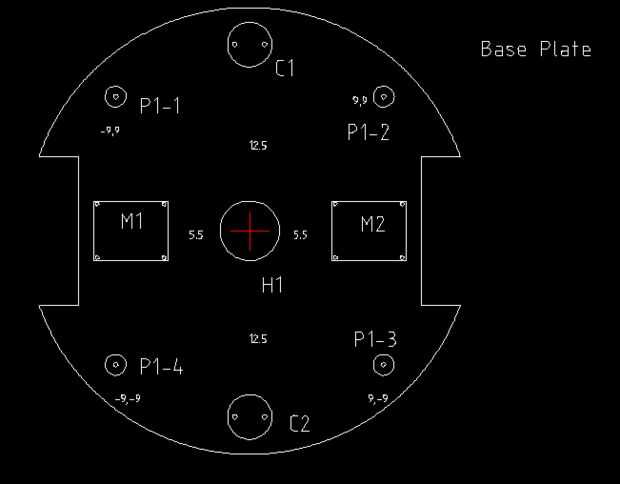
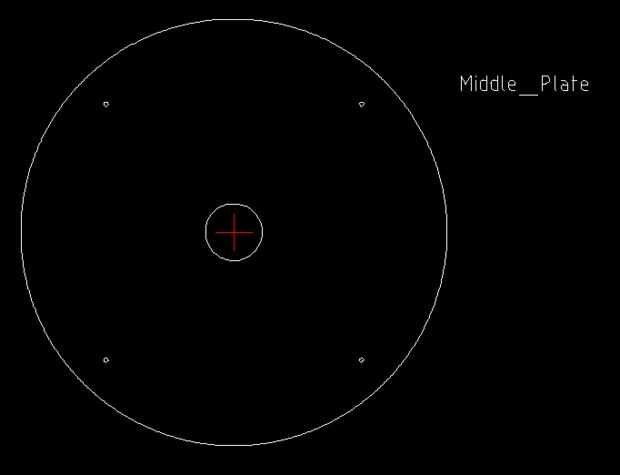
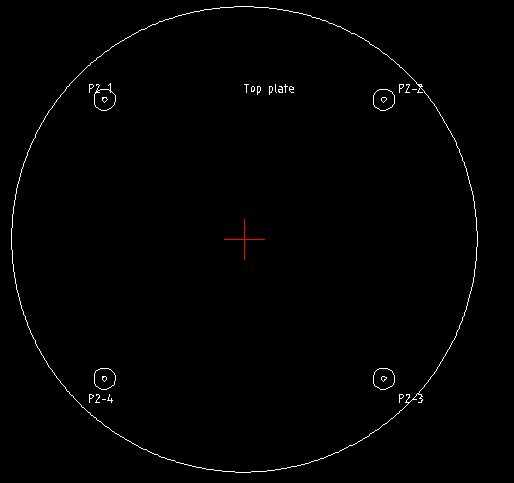
Se puede ver el diseño 2D de robot, placa base, placa media y placa superior del robot modelado usando LibreCAD.
A continuación se mencionan las dimensiones de placas y dimensiones de cada agujeros
Dimensiones
Aquí están las dimensiones de cada placa
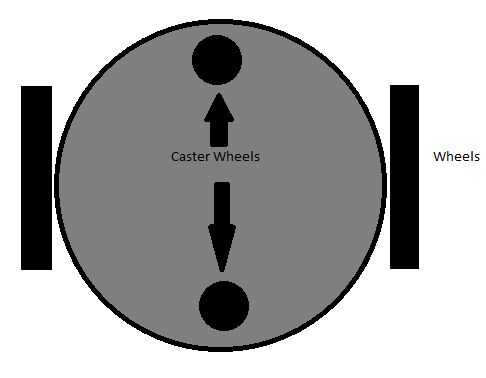
Placa base:
- M1 y M2(motors): 5 x 4 cm
- C1 y C2(caster wheels) radio : 1,5 cm
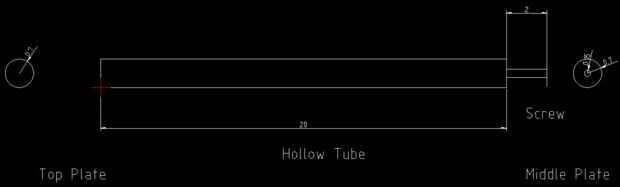
- S(Screw) radio : 0,15 cm
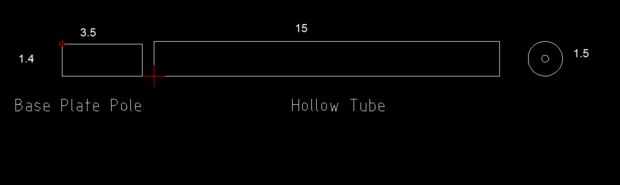
- 1 P1, 2 P1, P1-3, P1-4 : Radio exterior = 0.7 cm, altura = 3,5 cm
- Las secciones izquierda y rueda derecha : 2.5 x 10 cm
- Placa radio base: 15 cm
La placa media y superior tienen las mismas dimensiones de la placa base con el mismo tamaño de tornillo y otras dimensiones. Puede ver estas placas de la galería de imágenes.
Cada placas están conectadas con tubos huecos de tornillos. Puede ver las dimensiones de las imágenes.
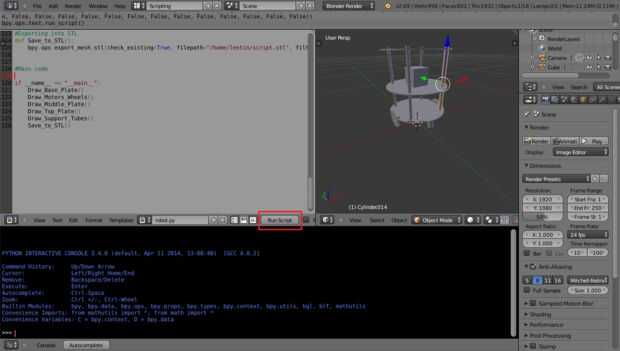
El modelado 3D se realiza mediante script en Python en Blender. Puedes ver los pantallazos de Blender con modelo de robot de las imágenes.
El script de Python y Blender se adjunta archivo de modelo 3D junto con este paso.
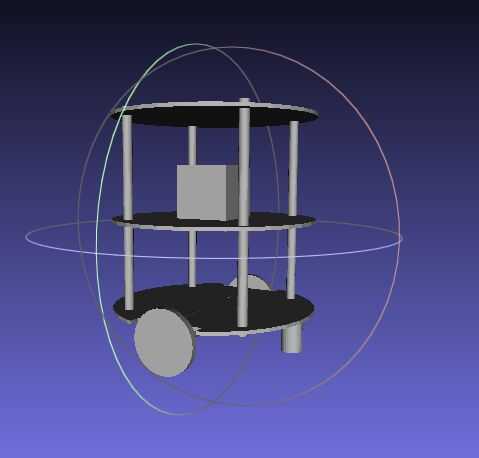
Podemos exportar el modelo de robot a STL puede visto en malla 3D visualización herramienta llamada Meshlab que está incluido en las imágenes.
El script en python para generar el modelo de robot en la licuadora se expone a continuación



")


 Stage1Model2")

")
")
 /w Arduino")


")