Paso 6: Rellenar y el tablero de energía de prueba







Rellenar el tablero de energía
Si tienes la placa inferior listo tomar los componentes y comenzar a soldar, para que esto vaya aún más fácil, siempre podía imprimir las ilustraciones serigrafía así y hierro para el tablero uno termine con el grabado. Yo sé, es negro, pero ayuda, y esto no se hace por belleza después de todo, pero para facilitar el montaje. Saltó esta parte y sólo vieron el monitor del ordenador portátil para averiguar que viene donde.
Como práctica general, siempre es mejor empezar con los componentes con el perfil más bajo. Empecé con los cables de jumper, resistencias, diodos, LEDs, condensadores y titulares de IC y terminó la soldadura poniendo los conectores en su lugar. El condensador de mayor altura fue agregado más adelante, este fue el último componente a soldar - por casualidad, también es el componente más alto de esta tabla. Usé mi tercera mano pie para mantener la junta fijada mientras se suelda.
Pruebas y solución de problemas de la placa de potencia
Sólo para estar en el lado seguro, decidí encender esto de mi laboratorio de PSU, con un límite de corriente a 200mA. Lo encendí, y entró al instante límite de corriente. En este momento tengo mi zumbador y comenzó pruebas contra cortocircuitos en la entrada, no había ninguno.
Para hacer (no si se suelda el IC directamente sin zócalos DIP...) lo más sencillo es ajustar el MC34063s hacia fuera y prueba otra vez. Lo hizo, y todo estaba bien, no pantalones cortos esta vez. Llegué a la conclusión, que uno o varios de ellos están creando la condición corta, así que comencé a colocarlos detrás uno por uno.
1. devolver uno aumentador de presión
Después de poner un MC34063 en una toma de impulso, prendí la PSU y no ver ningún cortos. ¿Qué hacemos ahora? Comprobamos la tensión de salida, que quería ser alrededor de 10V. Medí un 29V completamente loca, así que todo lo apagué a pensar lo que podría ser incorrecto. Primero pensé: resistencias de retroalimentación! ¿Son del valor correcto? Después de una breve comprobación, me di cuenta de que de alguna manera mezclar las resistencias de retroalimentación con otros componentes que tenía por ahí en mi escritorio. Consultar la hoja de datos otra vez (página 11) y calcular las resistencias de retroalimentación - no incluso cerca de lo que he tenido instalado. Cambiando a los valores correctos, el refuerzo llegó y me dio un buen 9.90V de salida - suficientemente cerca!
2. devolver el segundo booster
Éste era complicado, porque era capaz de medir la tensión de salida con el alcance, pero no con el multímetro. Después de un par de minutos, me di cuenta, que la pinza de tierra de la sonda alcance de hecho estaba conectada a los circuitos de red de tierra, pero fue la almohadilla pegada con la sonda negra de mi multímetro. Una isla de tierra de cobre completamente fue desconectado debido a un cable de puente que falta! Soldado que en y el problema desaparecieron. Salida Booster 2 fue reparado.
3. devolver uno de los convertidores buck
He quitado los aumentadores de presión para asegurarse de sólo ver eventuales errores debido a los convertidores del buck y enciende el circuito. Corto fue detectada, y mi fuente de alimentación entró en el límite de corriente. I doble cotejar con al menos un esquemas de docena buck de la web, vieron las resistencias de realimentación, buscó cortos entre rastros, mide la retroalimentación con alcance, pero no encontraron nada. Después de una hora de tensión finalmente se me ocurrió: Si usted invierte el diodo por accidente, usted conseguirá un corto circuito en cada ciclo de encendido de transistor interno del MC34063. Comprobé y sí, eso fue todo, los diodos fueron soldados en hacia atrás... la serigrafía negra que era demasiado perezoso para añadir habría ayudado aquí! Cambiando la polaridad del diodo a la normalidad, el buck enciende y me entregó un 5V constante.
4. volver a ambos convertidores buck
Después de su diodo volvieron a polaridad normal, este buck de 3.3V comenzó a trabajar así.
Con esta sesión de depuración completada con éxito, me vuelva a poner cada IC y enciende el tablero. No shorts, cada carril de presente, la junta inferior estaba funcionando correctamente, podía mover el casco superior.
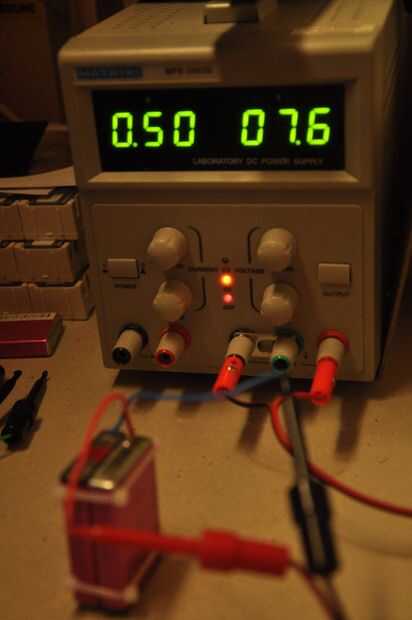
Baterías y carga
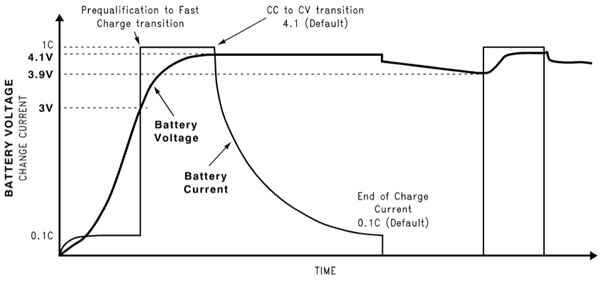
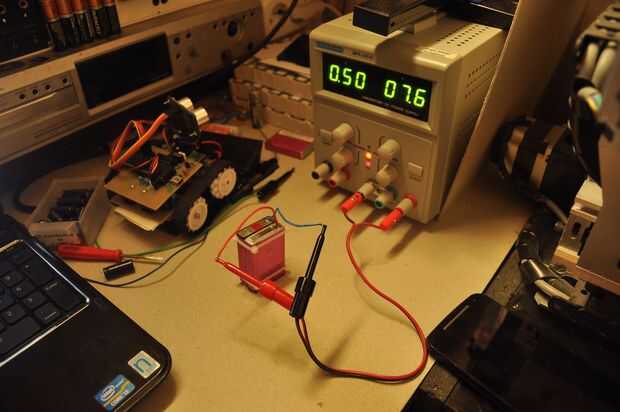
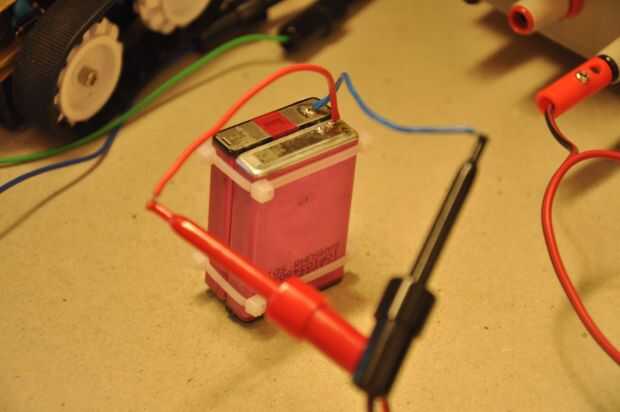
Fuente de alimentación también es algo que pertenece a este paso, y ya he probado con las baterías de Li-Ion, escribo un poco sobre cómo cobré mina. Os adjunto una foto de Perfil de carga a este paso, tomado de la web. Comencé a cargar las células cuando estaban en el punto 3.4 [V], con 1/10 de su capacidad, 180 [mA] a 8.2 [V]. Después de uno o dos minutos, dio vuelta el bote hasta fuente de 500 [mA] y mantuvo así hasta que salió de la fuente de alimentación de cortocircuito. Con la corriente disminuyendo lentamente esperé hasta que bajamos a 180 [mA] y dejó de cargar.
Ni-MH pilas nuevas, que viene con un cargador, que no tenía que molestarse con la carga de mi laboratorio de PSU.













