Paso 4: Preparación y conducción de la PCB
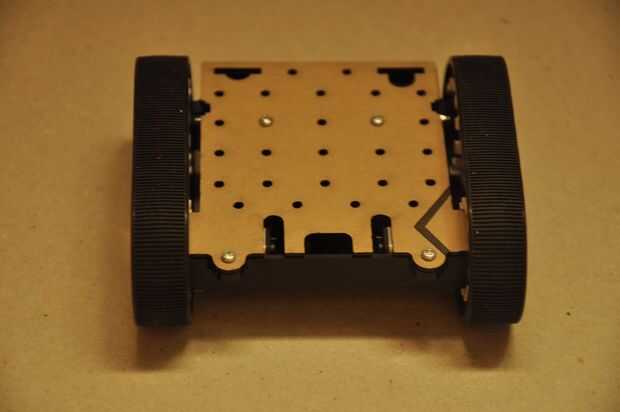
Tamaño del tablero
A diferencia con el tablero muchas hice antes, este proyecto fue un poco obligado desde el PCB tamaño punto de vista. Tuve que hacer el PCB, por lo que se adapta y se puede montar en el chasis del Zumo. Ya que yo no era capaz de localizar cualquier dibujo mecánico para los agujeros en la parte superior del chasis, tomó una pinza y había medido todo a mano. Después de estas que medidas de hecho, saqué el tablero, añadido de los agujeros para los tornillos y continuó poniendo los componentes.
Enrutamiento de
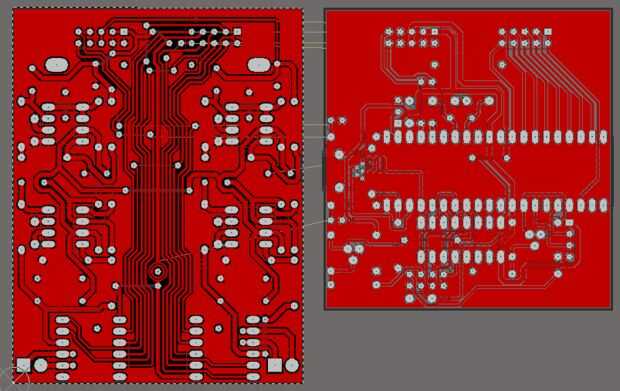
Cuando tablas de enrutamiento, debe probar y mantener los temas tan brevemente como sea posible, tan amplia como sea posible y lejos de cosas ruidosas. A veces puede respetar estas limitaciones, a veces no. Tendrás que sopesar que las limitaciones son las más importantes, y que son los que pueden tenerse en cuenta para un determinado nivel. Quería dos juntas que la anchura y longitud lo más corta posible, tuve que apilarlos. Esto significó que algunas líneas de control de la MCU fueron exactamente por encima de los inductores, no es bueno en absoluto. Decidí darle una oportunidad así, y suerte, no hubo ninguna interferencia. Después de todo, el consumo de corriente no es que alto.
Debe tenerse especial cuidado al instalar los convertidores de energía, las pautas de diseño pueden encontrarse en la web, pero el mejor camino a seguir es leer a través de la hoja de datos y encontrar la ubicación óptima del componente basado en las recomendaciones del fabricante del IC dado. Encontré una buena Descripción en tecnología lineal en la web. Tienen explicaciones, guías, imágenes, consejos y trucos que pueden ayudar. Cuento largo, tienes que reducir al mínimo la longitud de las redes de la corriente pulsante. Esto puede lograrse mediante la colocación de los componentes lo más cerca posible a los otros, con sus respectivos pasadores uno frente al otro. Polígono vierte también es recomendables, pero no podía ir así, quería que sea una tabla de una sola capa. Una tabla de una sola capa significa que todos los rastros de PCB cobre van en una capa, como ves en una de las imágenes, esta es la capa inferior, con la obra de arte con el rojo.
Disposición de las ilustraciones de exportar a PDF
Para serigrafiar un PCB, necesitamos algo que podemos planchar para el tablero revestido de cobre. Para obtener las impresiones, siga las instrucciones de uno de mis anteriores instructables. Espejo está apagado en la capa inferior, en la capa superior!!!! No olvides esto, o usted conseguirá una tarjeta duplicada, y sólo se darán cuenta esto después lo había perforado, limpió y soldar algunos de los componentes. Sabes lo que dijo Murphy: Si algo puede suceder, sucederá. Todo doble y ten en cuenta que el papel se dar la vuelta cuando lo plancha!













