Paso 22: actualización.



















Como este fue mi primero lo que yo llamaría "robot adecuado", hay cosas que no estaba muy contento al terminar inicialmente el construir. Una cosa era el alambres sucios que menciono en el post #47, que quería resolver. Otra cosa fue que toda la iluminación (a excepción de la matriz RGB de ojo) fueron accionados por energía independiente fuentes (pilas AA y AAA), así como el altavoz y el sensor "sonido a la luz" para la boca.
SISTEMA ELÉCTRICO PRINCIPAL
Así que después de pelar a las eléctricas, había arreglado la plataforma, puso todos los nuevos periféricos, marcado y perforado los agujeros para todos los cables que asoman a través de. Entonces fijo todos los periféricos hasta la plataforma.
En cuanto a periféricos, éstos eran 5v regulador ajustable bajar convertidores buck, ladrillos de relé de 5v, 12v 2 canales control remoto relé sonido y sensor de luz, EL relé de luces, regulador del motor de 10 amp, v4 EZ-B volver a colocar, dos baterías para motores EZ-B y coche. Una vez que todo fue fijado abajo, el cableado hasta comenzó usando el nuevo alambre de acero recubierto de silicona que ahora era de color codificado y reutilización de la extensión de servo y cables de puente.
REPARACIONES
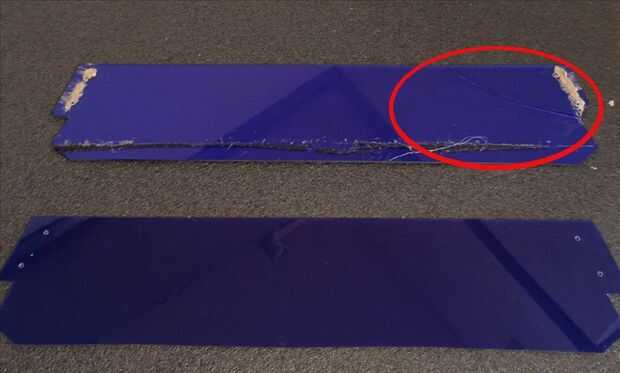
Durante Navidad K-9 tuvo un pequeño accidente al dar vuelta a una puerta. Tomó la vuelta muy apretada y frotó su costado contra el marco de la puerta con suficiente fuerza como para romper su panel acrílico azul. Así que logré ordenar otra hoja, había cortado a la medida y fija en su lugar. Pero para detener esto suceda otra vez, he añadido un par de bastones de madera dentro de los paneles de acrílico para actuar como refuerzos para que los paneles no flexión como mucho debería volver a suceder.
También reemplazar los topes de K-9 como uno en el panel roto fue destrozado cuando me lo quitaron, y tuve suficiente espuma de la tubería para reemplazar todos los topes. Pero antes de reemplazar los nuevos topes de lado, hice un cambio secreto adicional a los que se mencionan a continuación en la sección "Sensores" de (programación orientada a objetos, regaló el secreto ahora), que ayudaría a proteger los paneles de acrílico más.
ILUMINACIÓN Y ALTAVOCES
Como se mencionó anteriormente, todos de la iluminación fueron corriendo fuera de sus propias baterías, así cambié. Sencillamente, corté los compartimientos de la batería al chasis y panel de control luces, funcionó a través del paso abajo convertidores buck, se rompió a través de los cables positivo y funcionó a través de relés que guión con diversos patrones intermitentes en el generador de EZ.
Con iluminación de borde dorsal y la iluminación de EL de la boca, me los encontré a través de convertidores buck que son impulsados mediante pines Vcc digitales. La luz dorsal todavía es controlado por servo (servo Prensas botón para distintos modos de flash), y la iluminación de la boca se enciende automáticamente cuando el EZ-B no. También quita batería recargable del altavoz y había conectado directamente a tierra analógica y pines Vcc que enciende para arriba cuando el EZ-B no.
SENSORES DE
Flex de sensores.
Así que, como se mencionó anteriormente en la sección "Reparaciones", he añadido dos sensores de flexión que se unen en una posición estratégica dentro de los topes laterales que actúan como un sensor de golpe. Estos serán con guión, por lo que cuando un tope entra en contacto con un objeto como un marco de puerta cuando K-9 se está convirtiendo una habitación, el sensor de tope se doblará desencadenando una secuencia de comandos que se paran los motores impulsores, invertir, dirigir lejos del objeto, luego ajustar su rumbo para navegar de forma segura más allá del objeto.
Estos sensores son fáciles de configurar y funcionan con un puerto ADC. Escribí aquí un breve tutorial en el post #29, explicando como conectar estos sensores de flexión.
Sensores de sonido.
Después de cierto éxito apropiado estos sensores de sonido mi proyecto de Victor, decidí obtener más y que encajen en el K-9.
Discretamente escondidos dentro de la parte delantera de los topes laterales y también están conectados a puertos ADC. Estos están relacionados con el servo de cuello "look left/right", para que K-9 puede mirar en la dirección de la señal más fuerte que se ha detectado. Ideal para cuando alguien está hablando con él y también es útil como medida de seguridad donde si se detecta un sonido, puede hacer cosas como mirar en la dirección del sonido y tomar fotos, por ejemplo.
Sensor de luz.
Escondido debajo de la izquierda parachoques es un módulo de Sensor de diodo fotosensible que detecta cambios de luz. Si era a maravilla en una habitación oscura, el sensor de luz sería detectar y desplegar la antorcha. Es sólo un ejemplo de lo que voy a utilizar esto para.
Sensores ultrasónicos de "Ping".
K-9 ya tenía un sensor ping debajo de su cuello, pero sentí que necesitaba más para compensar el ancho más largo del cuerpo. Así que ahora él tiene dos más ping sensores montados al ras a los paneles frontales izquierdo y derecho de la pierna.
Simplemente éstos se guión para detener a un objeto (puerta marco ect), invertir y mantenerse lejos. El sensor de cuello ahora es estático (se quedó sin puertos digitales para el servo) que controla la longitud de la cabeza y toma medidas de evasión si es necesario.
También he añadido un otro sensor ping a la parte posterior del K-9, montado en el parachoques trasero.
Sensor PIR.
También he añadido un sensor de infrarrojos pasivo para la parte delantera del cuello de K-9 que, dependiendo de la hora del día, actuará como monitor de seguridad. Se apagará automáticamente (luces, servo liberar ect) en un período de tiempo y solamente con la ejecución del PIR. Así que cuando se detecta movimiento, se enciende y tomar las medidas necesarias. También he encontrado que es útil poder ahorra al vivo probar secuencias de comandos. Simple de alambre hacia arriba y conectado a un puerto digital.
4 en 1 sensor.
He ordenado esta como se ve como un gran sensor pequeño, y tenía un puerto i2c repuesto. No hay mucho que decir acerca de esto, como estoy esperando que la nave, pero no debería ser largo ahora. Sensor acelerómetro, giroscopio, brújula y temperatura todos incorporados en este. Tan pronto que k-9 saber desde abajo, caliente del frío y del norte del sur.
CHASIS
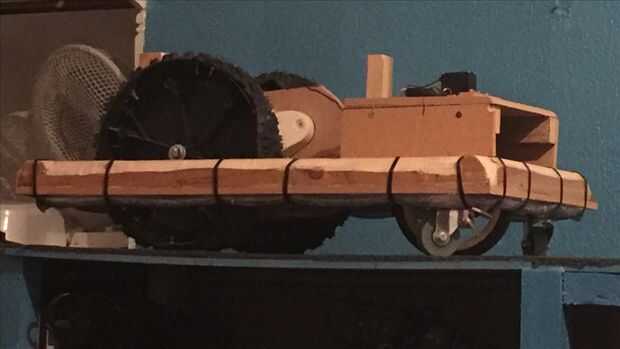
Sólo un pequeño cambio aquí, pero era necesario. El chasis tenía dos grandes ruedas y un volante frontal. Y a pesar de esta configuración, cuando K-9 tomaría una esquina un poco rápida, sus esquinas delanteras tienden a mojar a un lado. También estaba contento con todo el peso del extremo delantero descansa sobre una rueda.
Así que he añadido unas ruedas a las dos esquinas delanteras del chasis, y se desplaza mucho más agraciado, sin mirar como ha tenido a muchas latas de aceite para el almuerzo (si sabes lo que quiero decir).
SISTEMA DE ALIMENTACIÓN
Baterías LiPo son, paquetes de baterías de Nimh en. Las razones, bueno no es que no me gusta las baterías LiPo, ni mucho menos. Ellos suponen un gran ofrece una buena cantidad de corriente cuando sea necesario. Pero tengo dos razones principales por qué he hecho el cambio. La primera razón. Mi familia recibió una noticia devastadora, para que robótica tomó un asiento trasero como te puedes imaginar. Así que cuando volví a ella recientemente (otra razón para el cambio de imagen de K-9, así que podría tomar mi mente de cosas), conectado mi 7.4v y 11.1v LiPo de recarga (ver dónde va esto), sí, no cargue y ambos fueron tan muertos como un dodo. Como se imaginarán, era bonito (insertar palabras mal aquí), como las baterías fueron sólo unos meses de edad. Bastante mucho un desperdicio de sobre £80 / $125, que terminaron en la basura, todo porque no estaba alrededor cargar para arriba aun cuando yo no uso.
La otra razón fue que quería cargar las baterías mientras K-9 todavía estaba encendido (en una de bajo consumo, modo de escaneo de seguridad), con solo el EZ-B comprobar el sensor de PIR. También con el nuevo puerto de carga que he hecho, voy un día a convertir esto en un puerto de acoplamiento, así K-9 puede auto muelle y auto carga que, como usted puede o puede no saber, no se puede hacer con las baterías de LiPo, a menos que una cuchilla de la conmutación de circuito, que no sé cómo ir sobre esto de todos modos.
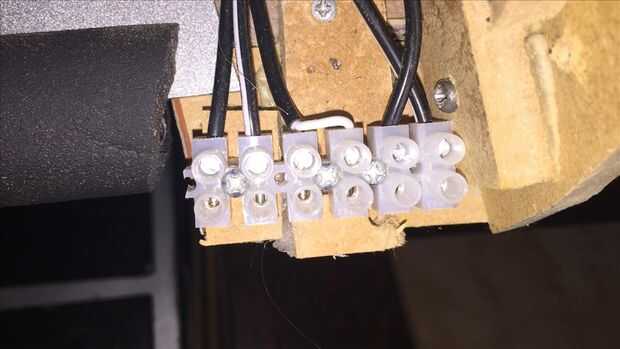
En cuanto a carga y acoplamiento de futuro posible, fijados un bloque de terminales de tarjetas de 6 maneras en el interior del panel posterior de la pierna y cableado, con el otro extremo conectado a los cargadores. Así que una vez conectado, este recargará el 7.2v EZ-B 12v sistema de impulsión y las baterías de la PC de la tableta. Aunque los cargadores de Nimh que compré tienen un poder de corte que comienza 4 horas, todos los tres cargadores están conectados a una red digital cuenta regresiva que os he puesto para dar vuelta apagado después de 2 horas, por lo que no hay peligro de sobrecarga de las baterías de Nimh. También están aislados por lo que puedo cargar cualquier batería necesaria, en su propio. Algún día dar el paso a los paquetes de baterías de vida, pero no sé lo suficiente sobre ellos aún para comprometerse a realizar una compra, ya que son bastante caros, y no parece que tienen muchos usuarios comentarios en la web.
UNIDAD DE PRESENTACIÓN VISUAL
En el panel de control que se encuentra en el panel dorsal de K-9, originalmente tenía una desplazamiento de pantalla, que mirado y trabajado bien, pero no mostrar cualquier información real de matriz de puntos. Así que he quitado y lo reemplazó con una pantalla azul que muestra vivo EZ-B y la información del sistema, así como algunos mensajes personalizados.
Otro pequeño cambio, pero uno importante es la pantalla en el panel de inspección del K-9. Originalmente tenía una tablet Android genérico de cheap'o, pero que ha pasado ahora. Android genérico, fuera... W3 de Acer con Windows 8, pulg. Se trata de un poco de un cambiador de juego para K-9, ya que esto ayudará a haciéndole mucho más autónomas y móviles con acceso EZ-Builder y le dará la capacidad de acceder a los archivos de sistema cuando está fuera de casa ya sea en una casa de amigos o un evento de caridad sin llevando mi laptop sobre así. También una pantalla ligeramente más grande es un bono.
Tuve que coinciden el panel de inspección para el nuevo tablet de la casa ya que es un poco más grande y colocar de nuevo el agujero para el cámara de frente y está diseñado para que la W3 es fácilmente desprendible extrayéndola desde la parte superior de la cara interna del panel.
También tengo enchufado de K-9 altavoz, ahora como Bluetooth para conectar mi teléfono a un divisor de auriculares, y un desglose de sonido de la EZ-B que va al altavoz, la W3 es también secuestrado el mismo altavoz, así que cualquier música, videos ect puede ser jugado a través de la W3 y escucha a través de un sistema de altavoces de mejor calidad. Y si conecto mi iPhone a la W3 través de la aplicación VCN que utilizo, no necesito usar mi portátil tanto para el control de un proyecto constructor de EZ completo, especialmente para el uso de controles como Pandorabot.
EZ-BUILDER PROYECTO
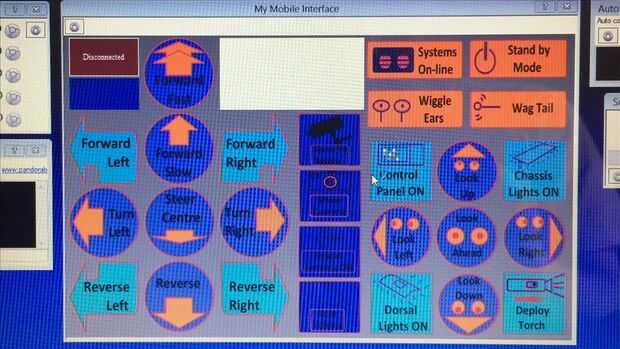
No hay mucho que mencionar aquí por el momento, como que estoy reescribiendo/reconstrucción del proyecto del EZ-Builder para reflejar los cambios realizados, pero una vez que tengo unas cosas que hacer, voy a publicar otra actualización. He hecho un comienzo con el control de la interfaz móvil, aunque esto puede cambiar ligeramente, pero no mucho. Hice los botones usando MS Paint que iba a usar para mi Victor proyecto, por lo que no son tan buenas como la probablemente podría ser, pero son diferentes y únicos, se ven bien en EZ-Generador móvil... y yo como ellos y fue mi primer intento de hacer botones personalizados también. Cuando un botón está activo, elementos del botón se pone en verdes, y cuando se detuvo, como ves en la imagen siguiente, y más botones funcionan como un bloqueo (push On / push Off) función que guarda en la pantalla de bienes raíces con no tener un botón de encendido y un botón de apagado.
HE TERMINADO DE ESCRIBIR AHORA, CASI.
Así es por ahora. EZ-B de K-9 es ahora completamente cargado, con cada puerto digital y pin, cada puerto analógico y pin, los tres puertos de i2c (bueno no del todo, ya estoy esperando el 4 en 1 sensor llegar) y el puerto de la cámara, todo en usan. El único que no es, es el UART 0 puerto que todavía está vacía, pero estoy seguro encontrará un uso para él algún día. Así que espero que algunos de la actualización encuentra interesante. Voy a ver si puedo conseguir para poner otro video pronto para cualquier persona interesada.
")




")







