Paso 10: Orejas, nariz, cola y mango trasero.



















No «E, N, T"orejas, clínica de nariz y garganta, sino más bien la"E, N, T, H"
oídos, nariz, cola y manejar el taller. Cuatro partes que muy fácil y divertido para hacer y se puede hacer en algunos aspectos, así que aquí está Cómo hice y montar las piezas para mi perro.
Parte 1. Orejas.
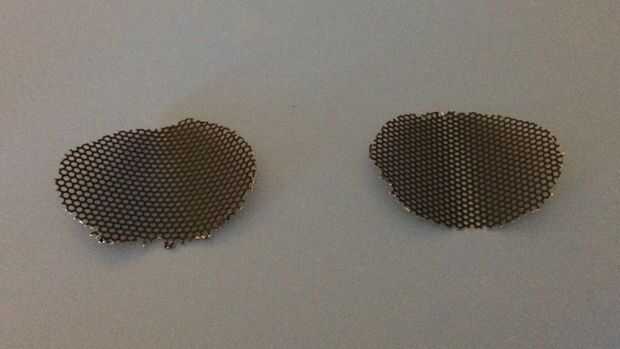
- Usando una rejilla de altavoz estéreo, marcar 2 formas ovaladas y corte cuidadosamente.
- Con una longitud de cable coaxial, cuidadosamente cortado a lo largo de la carcasa con un cuchillo y sacar todo el alambre interior.
- Alimentar el cable empalmado la carcasa alrededor de uno de lo borde del altavoz parrilla corte outs para que los 2 extremos satisfacen y cortaron la cubierta del cable de acceso.
- Pelar una pequeña cantidad del cable detrás de la carcasa y tubo algunos pegamento el y reemplazar. Para ello en ambos extremos de la cubierta y dejar establecido.
- Repita el proceso para la otra oreja.
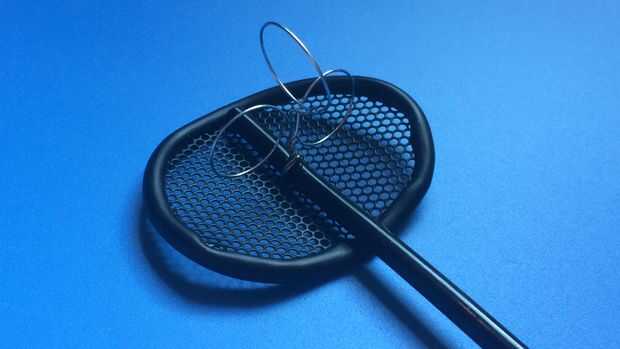
- Siguiendo el Consejo de la construcción Podpadstudios K-9, mencionaron que hicieron los tallos oído ser flexibles debido a la rotura y quería hacer lo mismo. Para esto usé 2 antenas de goma que tenía puesta alrededor.
- Utilizando algún alambre de acero fino, cortar tiras de 2 20 cm, alimentación a través de la parte posterior de la parrilla del altavoz en el centro y la anchura de la antena de goma.
- Coloque la antena de goma en el centro de la parrilla y tuerza los cables alrededor de él, un par de vueltas con los dedos, luego 4 más vueltas apretadas con un par de pinzas para fijar la antena.
- Con un rotulador, abrigo 1 de las longitudes de alambre alrededor de él para hacer un lazo y cortar el acceso.
- Hacer lo mismo con el otro a las longitudes de alambre y cortar la adelante un apagado en el final de la torcedura.
- Mover las asas posición (había mina colocada mal en las fotos. Necesitaban otro giro de 90 grados. Fácil de hacer y se puede ver en fotos más adelante).
- Repita el resto del proceso para la otra oreja.
- Rocíe 4 a 5 capas con pintura color cromo. Dar capas finas como los orificios de las rejillas del altavoz pueden obtener obstruidos con pintura.
- Cuando la pintura es seco sets orejas a un lado por ahora como se montará más adelante.
Parte 2. Cono de nariz.
Esto es fácil.
- Usando un lápiz grueso mercado plata, quite las tapas y los interiores luego enjuague con agua tibia jabonosa.
- Con una sierra para metales, corte a través de la pluma en un ángulo bajo para que la parte más larga mide unos 9cm.
- Cortar la tapa del extremo de la pistola por la mitad.
- Pintar la plata tapa de extremo (a menos que plata ya) entonces pegue nuevamente en su lugar a pluma.
- Lije levemente cualquier señalización de hasta la izquierda con un suave acabado en plata.
Véase. Dijeron que era fácil. Así que ponlo a un lado con los oídos para su posterior instalación.
Parte 3. De la cola.
Para esta sección de las piezas necesarias son una antena telescópica, un cierre de asa de metal de un llavero, una pequeña hoja de acero delgada (aproximadamente 2mm de espesor), un dirección rack el cargador de goma cortado a la medida, y 4 tornillos pequeños de no más de 8 mm de largo por lo que no pasan por el MDF superior trasera panel.
- Extender el extremo más fino de la antena y corte el extremo con un par de cortadores de alambre.
- Suavemente apriete el extremo recién cortado de la antena, luego inserte un pequeño destornillador para reformar el agujero como puede ser un poco aplastada debido a corte.
- Sujete la hebilla de llavero con un par de pinzas y con un segundo par enderezar hacia fuera uno de los extremos para formar una longitud de 3cm.
- Inserte el enderezado hacia fuera del extremo del anillo al final de la antena.
- Apriete el extremo de la antena con un par si alicates para apretar el apretón del anillo. Luego sobre una superficie dura martillo con cuidado al final para que sea lo mas ajustado posible.
- Extender el resto de la antena y perfore un pequeño orificio en el otro extremo más grueso de 7cm desde el extremo.
- Con una broca de sierra (o cuidadosamente con una sierra de calar) cortar un una pequeña ranura en el panel posterior superior del cuerpo, unos 5 cm de largo y sólo lo suficientemente ancho para el extremo más grueso de la antena para caber a través.
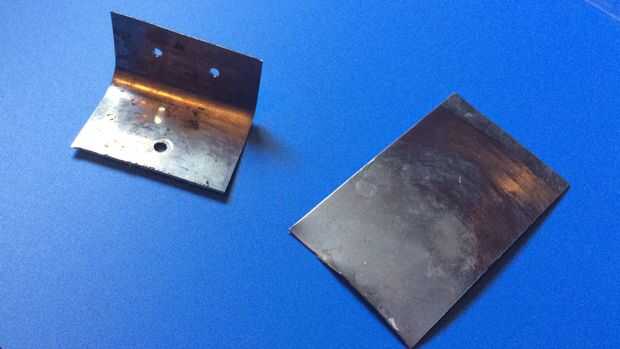
- Cortar dos cuadrados de los 5x5cm de la hoja de acero y doblar ambos cuadrados por la mitad a 90 grados para soportes forma de "L".
- Taladro 2 agujeros pequeños en un lado de los soportes y un agujero, en el centro, en el otro lado de los soportes.
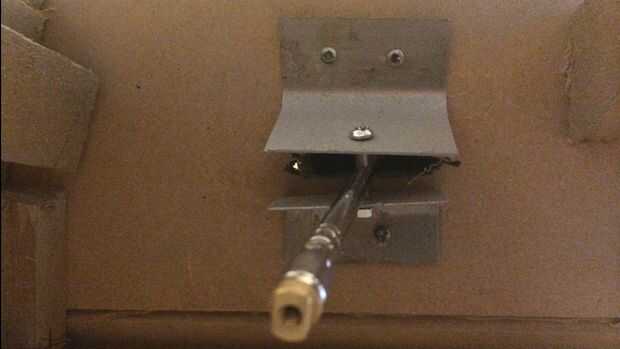
- Atornille los soportes en el interior de la parte superior trasera, justo por encima y por debajo de la ranura, teniendo cuidado de los tornillos no vienen por el otro lado. Con el soporte grueso 2mm y 9mm MDF, sea seguros utilizar tornillos de 8mm.
- Inserte la antena/de la cola a través de la cubierta de goma y luego por la ranura del hilo de rosca un tornillo a través de los orificios del soporte único y el taladro a través de la cola, y apretar con un tornillo.
- Haga 2 pequeños agujeros en el fuelle de goma y al panel posterior, uno en la parte superior y uno en la parte inferior, luego sujete con 2 tornillos negros pequeños.
- La cola debería tener ahora una buena gama de movimientos de izquierda y derecha. En unos cuantos pasos nos conectando un servo para la cola.
Parte 4. La empuñadura trasera.
- Medir la distancia de los 2 orificios del mango y marque en el centro del panel inferior del cuerpo espalda, justo debajo de la toma de carga.
- Taladre 2, inserte los tornillos desde el interior y fije la empuñadura.
Ahora está hecho este pequeño trabajo, tiempo a pasar el el siguiente paso importante de la construcción. La sección cabeza y cuello.
")




")







