Paso 17: La electrónica.

















Cortar una hoja de MDF para hacer una plataforma y me montado dentro del cuerpo. Esto es donde se alojaría la mayoría de la electrónica. Luego fue tiempo de romper el kit de desarrollo de EZ-Robot y marcar donde todo fue a sentarse.
Después de trazado donde se le encuentra los servos , empecé por colocar el servo de cola. Se atornillan en el lugar y una varilla de acero fue cortada y en forma, entonces adscrito al horn del servo y de cola. Servo próxima a la cama equipada era para el panel de control e iluminación de chasis. Usando algún trozo de MDF de paz, corte y atado a la plataforma y encuentra los paquetes de baterías de la iluminación. Entonces el servo se fijó en su lugar asegurándose de que el cuerno del servo podría llegar a los botones de modo intermitente en los paquetes de baterías. El servo del siguiente fue que se ajustó por el dorsal y el cuello EL cable de iluminación. Algunos tornillos se fijaban en su lugar a casa el paquete de baterías, y el servo instalado asegurando que el cuerno del servo puede activar el botón de modo intermitente. El servo del pasado fue cabido para el interruptor que se convertirían todas las luces de encendido y apagado. Para esto se utilizó la adición de un interruptor de palanca.
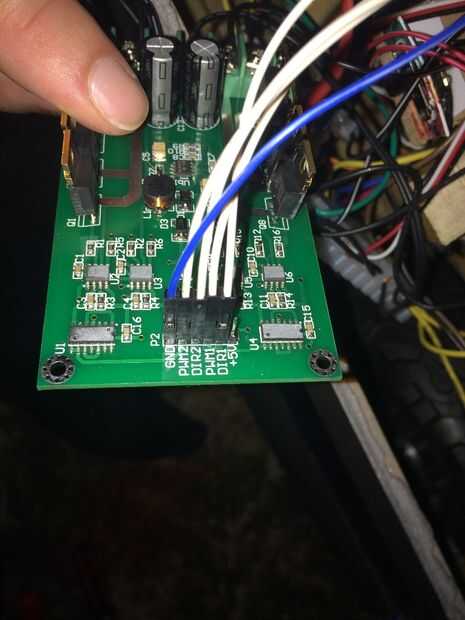
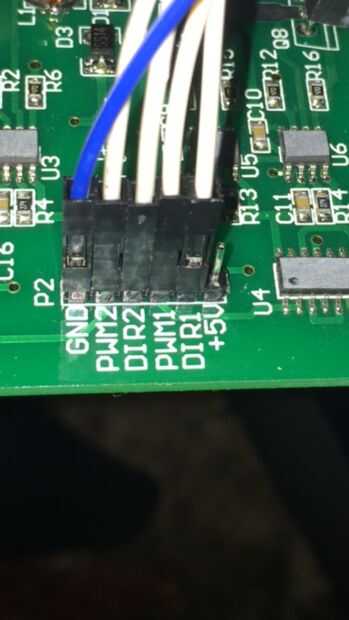
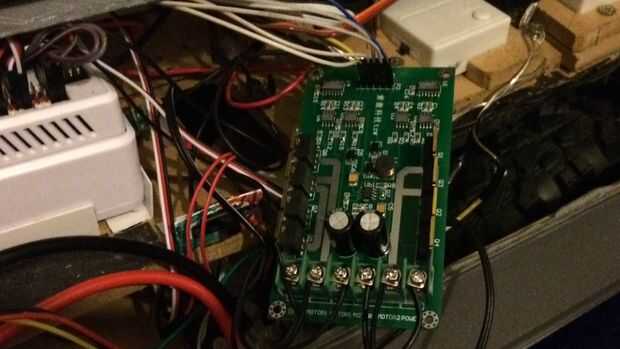
Un corte en los cables de tierra de todas las luces conectarse el interruptor basculante y fijo en su lugar bajo el cuerno del servo. Cuando se activa el servo, alternar el interruptor de encendido y apagado. Para control remoto encendido/apagado sistemas principales de K-9, un relé de control remoto 12v de canal dos interruptor fue cabido. La entrada de energía sería el de la 12v batería y los terminales de relé conectarse al microcontrolador EZ-B. Regulador del motor de puente de H con el regulador. El siguiente punto para instalar era un dos canales de 12v, el regulador motor de 10 amp con puente en H. Los dos motores estaban conectados y regulador de 5v se ajustó a los terminales de entrada de energía. En el lugar de montaje de un sensor telescópico para panel de ojo de K-9 (como el visto en los programas de televisión) que quería montar algo útil. Fui para un sensor de detección de humo y gas. Esto fue cabido detrás de una de las franjas de panel de ojo acrílico azul y conectado a los cables u instalado previamente para este propósito. Ahora todos los periféricos eléctricos fueron cabidos, que era tiempo de conectar todo y dar K-9 un cerebro. Pero antes de eso, era necesario un pequeño hack.
")




")







