Paso 11: Motor ESC conexión
Podemos conectar el variador electrónico (ESC) para el motor, tenemos que conectar los motores a la sus respectivas monturas.
El primer paso es sacar todas las piezas y asegúrese de que tener el motor, el Monte, cuatro tornillos de montaje del motor y un adaptador de hélice.

A continuación, alinee el montaje del motor al motor. Usted querrá mantener el lado con los agujeros que se curva hacia adentro en la parte inferior.

Luego, simplemente use los tornillos de montaje del motor suministrado para conectar el motor a la bancada. Asegúrese de hacer estos apretados como una vez que este montaje sobre el marco, será difícil acceso. Se hacer éstos para todos los motores de cuatro.

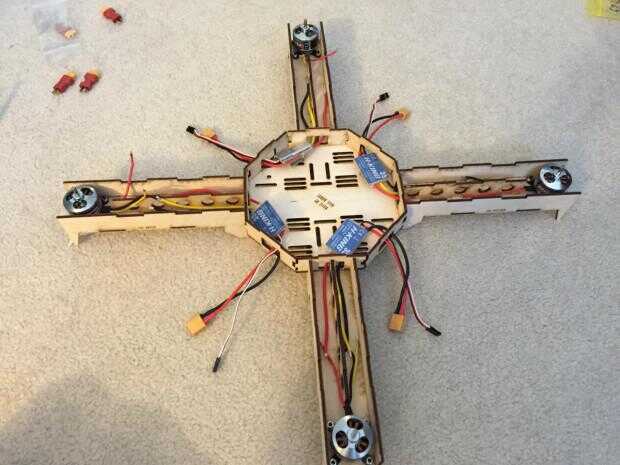
Una vez haya conectado los soportes del motor para cada motor, tienes que conectar el motor a la estructura. Uno de los errores que hice fue configurar mi motores con mi CES antes de montar en el chasis. Después de configurar todo, me di cuenta que simplemente no caben el motor a los cables de salida a través de sus ranuras previstos sin deshacerlos. A continuación muestra el error que cometido. De manera similar a mi error de conjunto de la estructura, no deben hacer alguno de estos pasos. Estos es simplemente mostrar el error que hice para no repetirla.
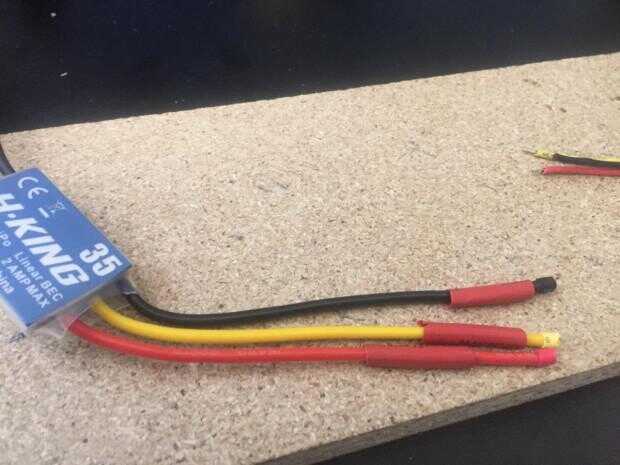
Si usted toma los motores y los CES, te darás cuenta que los CES vienen con conectores de bala, mientras que los motores vienen sólo con alambre trenzado expuesto.

Una opción que tienes es que prensan y conexión de conectores de bala a sus motores. Sin embargo, elegí la ruta de les de soldadura directamente en esto no sólo proporciona una conexión más sólida entre el motor y el ESC, pero también era más fácil para mí a soldarlos. Para ello, primero tienes que usar sus tenazas para cortar los conectores de bala de los CES.

A continuación, usted necesita cortar un trozo del encogimiento de calor de 5mm y ponerlos sobre los cables de salida. Usé aproximadamente una pulgada del encogimiento del calor para cada cable. Asegúrese de que no hay que olvidar este paso antes de soldar, como para la soldadura de los cables y poner en el encogimiento del calor.
A continuación, utilice el pelacables para tira de una pequeña sección de un cable en la ESC. Empecé con el cable de tierra (marcado como negro).

Ahora, simplemente cada alambre de la lata un poco y soldar las dos piezas entre sí. Deslice el encogimiento del calor sobre la conexión de soldadura y luego ligeramente la plancha en el encogimiento del calor para reducirlo y aislar la conexión de soldadura. También puede usar un encendedor para ello como puede ser más rápido, pero me pareció más fácil de usar solo mi soldador.

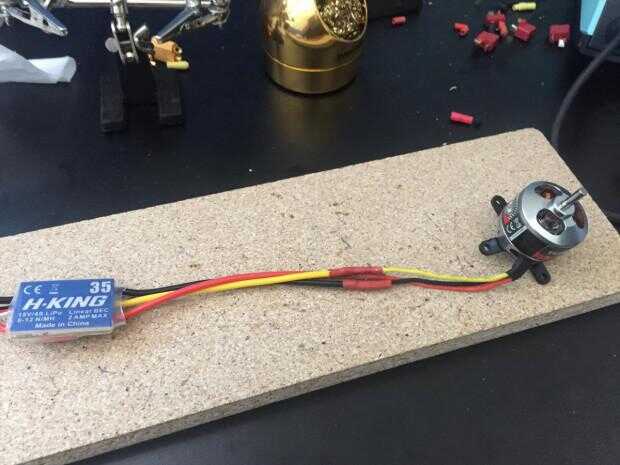
Ahora, repita estos pasos con cada alambre. Para evitar cualquier cortocircuito accidental, hice cada cable a la vez. Los cables deben ser de color codificado, así que les juntas de soldadura debe ser sencillo. Sólo coincide con el negro con negro (masa), el rojo con el rojo (energía) y el amarillo con amarillo (señal). Al final, debe tener un motor completamente conectado y un combo ESC.
Ahora, conecte la batería directamente a la ESC con los decanos al adaptador de la ESC. Una opción que tienes en lugar de utilizar el adaptador es simplemente desoldar la clavija del Decano y conectar un adaptador de XT60. Sin embargo, decidí utilizar el adaptador para la conexión de la batería, porque si cortas accidentalmente la batería LiPo, realmente puede explotar! Baterías de LiPo de son particularmente volátiles como siempre mucho tienen carga en ellos. Litio es una sustancia altamente volátil y puede causar fácilmente un incendio de LiPo, que es extremadamente difícil de contener. Puede, sin embargo con seguridad de la soldadura del conector y un adaptador nuevo de la soldadura en, pero recomiendo altamente haciendo un cable en un momento y ser extremadamente cuidadoso para no lo corta. Aquí hay un enlace a una guía en video sobre cómo hacer eso, si eliges tal ruta.
Repita estos pasos para todos los motores de cuatro, cada uno la prueba como vas. Esto es donde cometí el error. Todos estos pasos son correctos, excepto que desde ahora, los cables se sueldan en, no podrás para que encajen en los agujeros de motor ESC en la apertura de cada brazo en el marco. Cuando vas haciendo esto, en primer lugar Alinee el motor montado en el brazo así:

Ahora simplemente toma tu M3 tornillos, arandelas y tuercas y montar en el brazo. Me pareció mucho más fácil hacer los tornillos más cercanos al centro de la primero y sólo después de hacer los exteriores.

Hacer esto para todos los motores de cuatro. Ahora debe alambre los CES a través de sus orificios de respeto por lo que cada motor tiene una salida:
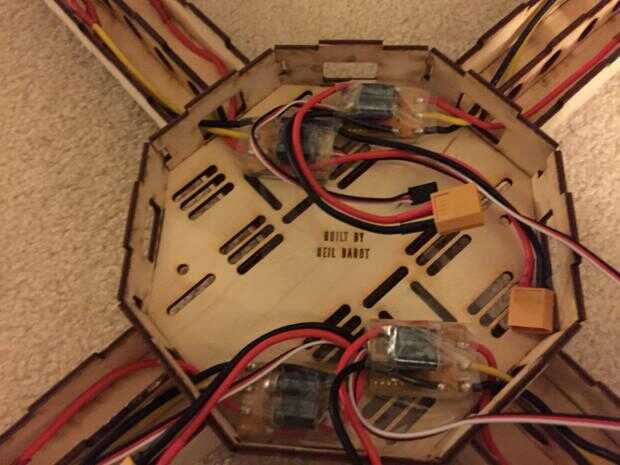
Ahora siguiendo los pasos anteriores, la soldadura de las conexiones. El CES deben encajar en el centro, y los cables deben ser soldados:
Otra vez, compruebe que cada motor funciona con la batería. Junto con esto, se debe calibrar cada ESC con su transmisor RC. Para hacer esto, conecte sus ESCs a la batería y la conexión del servo 3 pin a los pines del acelerador en su receptor RC. A partir de ahí, tienes que calibrar sus ESCs individual siguiendo las instrucciones del fabricante de la APM:
- Conecte uno de los cables de tres hilos ESC en el canal de la válvula reguladora del receptor RC. (Esto generalmente es canal 3).
- Encienda el transmisor y ponga la palanca del acelerador al máximo (full para arriba).
- Conectar la batería del LiPo
- Usted escuchará un tono musical y dos pitidos.
- Después de dos pitidos, baje el acelerador adhieren al completo hacia abajo.
- A continuación escuchará una serie de pitidos (uno para cada célula de la batería que está utilizando) y finalmente un largo pitido indicando que se han establecido los puntos finales y la ESC está calibrado.
- Desconecte la batería. Repita estos pasos para todos los ESCs.
- Si parece que el ESC no calibra el canal en el transmisor de válvula reguladora deba invertirse.
- Si sigues teniendo problemas después de probar estos métodos (por ejemplo, CES todavía sonido continuamente) intente reducir su acelerador recorte 50%.
- Asimismo puede tratar de alimentar la placa APM a través de la USB para arrancar antes de conectar la LiPo.
Tienes que hacer esto porque si bien había calibrado su controlador RC en el APM tu ESC no sabe tus rangos de aceleración. Esta calibración enseñará su ESC Cuáles son los valores mínimos y máximos para el gas. También puede intentar hacer el todo-en-una vez calibrado, pero que no parece trabajo para mí y no creo los CES que utilizo son compatibile con eso. Usted puede encontrar esa información, así como la fuente de los pasos anteriores aquí. Para comprobar si el ESC está calibrado correctamente, tratar de controlar el motor con el acelerador y asegúrese de que el motor responde como lo mueve. Si el motor no responde a valores más bajos de aceleración, pero entonces inmediatamente toma en un momento determinado, es probable que no ha calibrado correctamente su ESC. Si todavía no funciona, es posible que se mueven algunos de los modificadores que aumenta artificialmente su máximos y mínimos de aceleración.






 clap switch kit para principiantes absolutos")




