Paso 10: Instalación de RC
Como usted está caminando a través del asistente, se llega a la sección de calibración RC. Antes de hacer esta parte, usted necesitará primero enlazar su transmisor RC (regulador) a su receptor. Esto normalmente se hace usando un lazo del enchufe que viene con su controlador.

Fuente: rc-aviones-world.com
Se conectará este bind plug al primer puerto de la emisora RC. Si no recibes un enchufe de bind, usted puede hacer su propia! Es realmente muy simple. Todo lo que tienes que hacer es tomar uno de los cables de extensión de servos y corta la señal y la tierra. Cómo hice esto era tomé mis cortadores de alambre, cortados un extremo del conector de servo y lo despojó. Luego utiliza pinzas para extraer el pasador central y soldar la señal y cables de tierra.
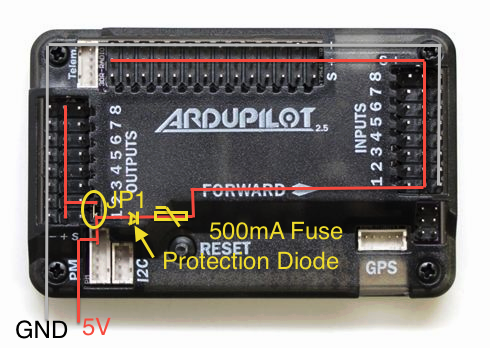
Desde allí, simplemente tienes que conectar cualquier entrada a las entradas APM utilizando un conector de servo hembra a hembra, y el transmisor será conseguir el poder. No se enciende, pero si que te has alineado hasta el cable correctamente en la entrada, conseguirá energía. Para confirmar que has hecho bien, asegúrese de que las líneas de señal ir a la línea de señal en el APM, el poder va a poder, y el suelo va a tierra. Corriente y tierra areusually indica el conector los cables rojos y negros respectivamente. Este es el circuito en el APM tomado directamente desde su página web.
Ahora, simplemente mantenga pulsado el botón bind en la emisora (controlador) y encender manteniendo todavía atar. Asegúrese de que su válvula reguladora está completamente hecho mientras encendido. Debe emitir un tono un par de veces y la luz del receptor deberá encenderse. Esto significa que el transmisor ha enlazado al controlador con éxito. Lo que esto significa es que el controlador es ahora siempre emparejado con sólo este transmisor (a menos que reiniciarlo con el botón bind). Esto es para evitar que otros accidentalmente envía información a su transmisor y para evitar que accidentalmente envía datos al receptor de otra persona. En cierto modo, es similar a cómo usted par un smartphone a un dispositivo bluetooth. Usted está esencialmente pseudo permanentemente emparejando su transmisor a su receptor.
Si esto no funciona la primera vez, no te preocupes! Asegúrese de que ha conectado su receptor a la APM correctamente y asegúrese de que la APM está recibiendo alimentación (ya sea a través de la computadora o aunque la batería). Pruebe otra vez un par de veces. Si no funciona, te sugiero mirar las instrucciones del fabricante para el enlace. De la investigación que he hecho, es bastante estándar a través de todo, pero transmisor/receptores múltiples para confirmar que no lo he probado.
Ahora tenemos que el transmisor del alambre completamente a nuestro APM. Esto puede hacerse siguiendo este diagrama fácil de usar:
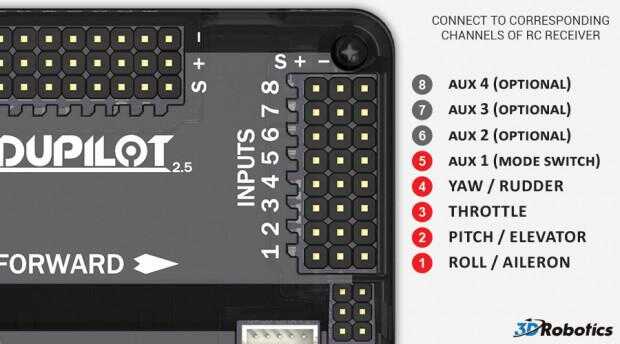
Coincidir con la configuración de pines del transmisor con estas entradas en la APM. Un tema que me pareció leer sobre a menudo en mi investigación es que la gente a menudo miswire del acelerador, porque en muchos receptores, acelerador es canal 1, mientras que en el APM se trata de canal 3. Asegúrese de confirmar con manual/guía su receptor en cuanto a cual pin es cual. Utilice los conectores de servo de hembra a hembra para conectar, y usted debe ser todo listo!
Ahora volviendo al asistente de APM, puede calibrar el controlador RC confirmando que está en el modo de calibración de planificador de misión y luego moviendo su RC pega en todos los bordes y todas las direcciones posibles. La página debe verse algo como esto, como se ve en la Página Web de APM:

Una vez hecho esto, usted puede ahora configurar modos de vuelo para su controlador RC. Esto es donde realmente brilla APM. APM es un conjunto tan madurito de la tecnología, han realmente refinado sus algoritmos bastante. Debido a esto, son capaces de proveerle con modos de vuelo como estabilice, Loiter, vuelta a casa (o RTL), Acro, y así sucesivamente. Las más importantes a conocer son estabilice, regreso a casa y Acro. Estabilizar hace exactamente lo que probablemente crees que lo hace. Siga sus controles manuales, pero trate de estabilizarse como usted está volando. Recomiendo esto para cualquier principiante, y sorprenderá lo duro que es volar en su primer vuelo. Después de un rato, le parecerá fácil porque lo ha hecho antes, pero en principio, es sobrecogedor y estás asustado de que se caiga. Pensar como aprender a conducir un coche! Si han conducido por un tiempo, conducir se vuelve extremadamente fácil! Aún no pensamos en ello. Sin embargo, si piensas volver a cuando estaba aprendiendo, seguramente que puede recordar la aprehensión poco que tenía, mezclados con emoción, sentó en el asiento del conductor por primera vez. Regreso a casa simplemente tratará de volver a tomar-fuera posición y auto-land. Esta es una característica muy útil, pero es depende de su calibración. Más exactamente se calibrar mejor/más éxito esta función. Me resultó difícil perfectamente calibrar yo mismo, por lo que he encontrado la lista de parámetros del árbol y compensar manualmente algunos valores a mi gusto. Finalmente, es el modo Acro que es modo libre básicamente con el APM que solo sigue lo que dices. Este es el verdadero control manual. Esto será difícil de usar! Sin embargo, es una gran herramienta de depuración para ver exactamente que compensa están equivocados.
Un error que me topé cuando configurar manualmente mi compensaciones era que yo me ajuste basado en cómo estabilizar el vuelo en. Debido a esto, yo no estaba obteniendo grandes resultados. Una vez que el cambio a modo Acro, pude establecer con más precisión mi manual compensaciones, para mejor vuelo.
Usted será capaz de establecer sus modos a través de la sección de modo de vuelo el manual obligatorio de configuración de hardware. Como los conmutadores se mueve alrededor en la emisora RC, diferentes secciones destacará, diciendo significa que cada posición de interruptor. Desde allí, puede cambiar las decisiones en consecuencia. Personalmente recomendamos estabilice como una herramienta de aprendizaje, volver a casa para ayudarle a la tierra y Acro para depurar y ver por qué algo no está actuando correctamente.
Por último, son los modos a prueba de fallos. Esto es lo que ocurrirá cuando el voltaje de la batería disminuye demasiado, si su transmisor RC (controlador) muere, o si empiezas a volar nuestra de gama de su controlador. Sugiero que el parámetro de la tierra o volver a casa para que si hay algo que va mal, estás seguro, y no volar el drone. Se podría pensar que es ridículo, pero es un problema sorprendentemente enorme en la industria, incluso para los abejones comercialmente hechos! De hecho, es tan común, que el Wall Street Journal escribió acerca de él.






 clap switch kit para principiantes absolutos")




