Paso 7: montaje


















Mecanismo de giro al marco
Montado el mecanismo de giro en la parte posterior de cada pieza de marco usando los agujeros en cada uno que perforé antes. Lo hice con tornillos de 5mm desde el módulo de giro que pasa a través de agujeros en el marco y luego aunque no se hace una cuadrado de aluminio de 3mm que fue utilizada como refuerzo para distribuir el peso uniformemente, si entonces se corre el riesgo de la cara posterior todo de la marco partiendo. Luego se unieron estos pernos con tuercas de seguridad y el mecanismo de giro se hizo seguro.
Ensamblaje de la pieza de la pierna
Ahora que la estructura fue armada comencé a colocar las piezas de la pierna juntos a sus pivotes y luego adjuntarlas a las cajas de engranajes y motores eléctricos. Los componentes de la pierna fueron sujeto fácilmente con tuercas de seguridad y luego sujeto en pares a 4 cajas individuales
Caja de cambios al marco
Ahora que los conjuntos de pierna y cajas de cambio podrían encajar dentro del marco estaba lista para iniciar el proceso de montaje. En primer lugar os adjunto los pares de la pierna a mi marco usando las barras a través de las pintas de pivote, espaciadores y tuercas de seguridad. Después de esto se hizo las piernas fueron completamente montado y exactamente fuera de fase con excepción de la caja de engranajes colgando la parte de atrás. A fin de seguro esta abajo I había probado dos métodos diferentes. El primer error para mi pero tampoco funcionaría si se hace correctamente. Ambos métodos involucrados utilizando plástico de acrílico para hacer un montaje de la caja de cambios (en la foto). Estaba hecha de plástico acrílico grueso de 3 mm cortar con una herramienta eléctrica y fijados en el interior espacio de la estructura con la mitad de lo que domina en la caja de cambios. El lado delgado es donde se sentaba el motor.
Para el primer método creía que las piernas le exprimido más eficazmente si os adjunto este montaje a mitad de la altura del marco. Construí una restricción de apoyo en orden para que esta idea de trabajo. Sin embargo después de que pruebas la pata fija con las cajas de cambio a esta altura el montaje roto realmente bajo la presión generada. Me di cuenta de que la razón de esto es porque al tener el mecanismo de la caja de cambios arriba entonces mucha fuerza generalmente transferida en el marco se transporta en este pequeño pedacito de plástico. A pesar de que las piernas se movió más rápido de esta manera simplemente no funcionaría para mí por lo que para mi segundo intento he cambiado la altura del montaje. en lugar de aumentar hasta decidió adjuntar a la parte inferior del bastidor principal. después de la fijación y pruebas iniciales esta altura funcionó a la perfección para el proyecto y las piernas caminan exactamente como se pretendía, aunque un poco más lento
Electrónica
Primero de todo había montado todo mi electrónica e hice todo mi cableado (fotos más claros de esto pueden verse en el último paso). Por un lado tenía el interruptor, variador y batería y en el otro el servo, antena y receptor.
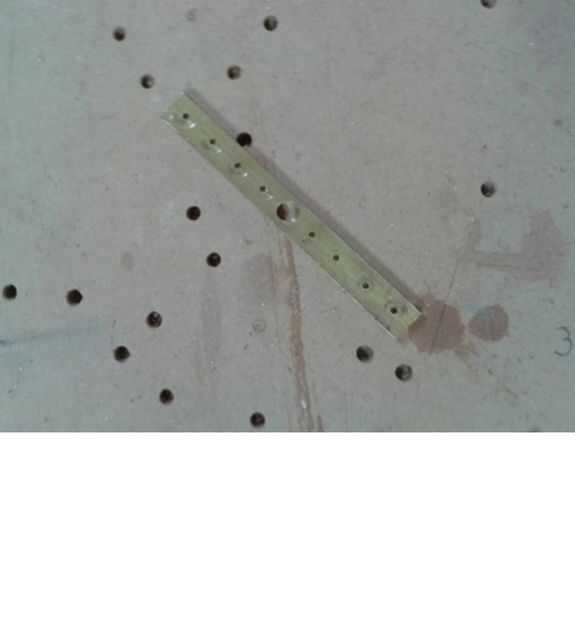
Antes que el servo a mi mecanismo de giro que tenía que hacer un método de montaje apropiado para ella. En primer lugar quiero hackear aserrado hacia fuera de un pequeño rectángulo de una hoja de latón y nueve orificios en ella, cuatro pares de los cuales emanaban hacia fuera del agujero central a distancias especificadas. A continuación aseguró el rectángulo de latón en la barra de cobre amarillo conectado a la corona grande y después de asegurarse de que era paralelo a la parte posterior del servo soldar con un soplete. Una vez que esto fue unida pude luego hacer empuje brazos entre el servo y mi brazo de reacción a mano.
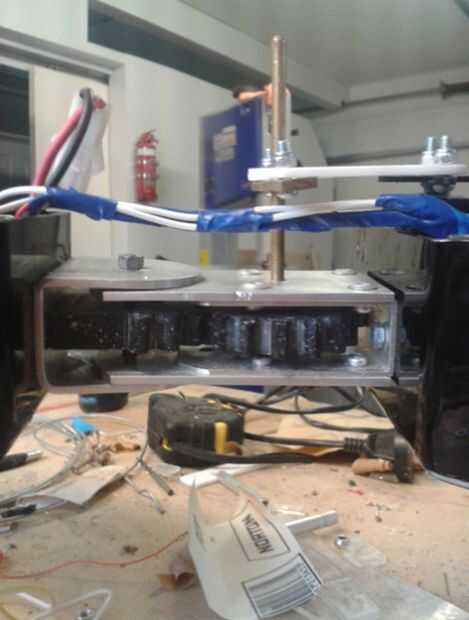
Después de que la electrónica se montaron empecé a probarlos para ver si todo funcionaba como se esperaba (en la foto) en la primera prueba que utilicé clips estirados hacia fuera en vez de los brazos de empuje para asegurar que el sistema funcionaba antes de correr el riesgo de más equipo.
Con esta prueba de que el servo funciona mediante control remoto era entonces capaz de físicamente montar los brazos de empuje real que hecho a mano de acrílico. Las pruebas de este mecanismo así demuestran que funciona perfectamente como está previsto incluso con todo el peso de ambos lados de mi proyecto adjuntadas.
Aquí hay un video de un sistema de trabajo de piernas.



")





 (impresión 3D)")



