La Idea:
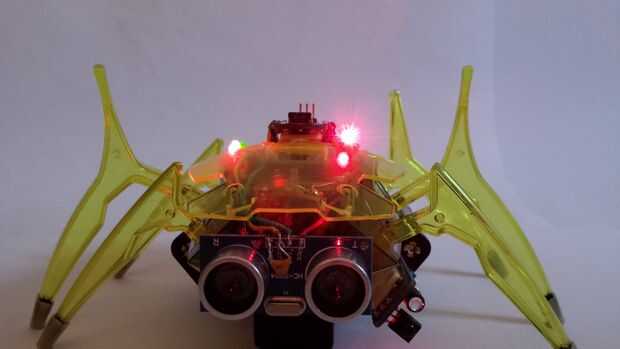
Para construir una araña robótica programable basada en escarabajo Hexbug, equipado con el siguiente conjunto de sensores:
[video]
Sensor de distancia ultrasónico
- Obstáculo infrarrojo sensores y equipos
- Giroscopio
- Acelerómetro
- Puntero láser
El robot debe ser capaz de hacer muchas cosas. Entre ellos:
- Mover adelante, atrás y girar.
- Mantener la dirección
- Detectar y evitar obstáculos
- Detectar siendo al revés o del lado
- Flash de LEDs, apunta la dirección con un rayo láser
Como Escarabajo tiene Arduino Nano a bordo, podría ser programado para realizar diferentes acciones, incluyendo servir como una plataforma física para ejecutar programable en el equivalente del lenguaje de programación Logo.
La decisión de tener dos sensores para detección de obstáculo viene del hecho de que cada uno de los sensores tiene sus limitaciones:
- Sensor de ultrasonido no detecta objetos blandos (por ejemplo, un oso de peluche)
- Sensor de infrarrojos no detecta objetos negros
(Un oso de peluche negro es todavía algo un reto para este escarabajo...)
Cuando scarab detecta un obstáculo, se realiza una "danza".
Una danza es una secuencia de movimientos que escarabajo realiza para ayudar a decidir cómo ir alrededor de un obstáculo. Algunos de los movimientos de danza son apenas para la diversión y lucir.
Actualmente escarabajo realiza 3 bailes diferentes, que elige al azar frente a cada obstáculo:
- Al azar, girar a la derecha o la izquierda por 90 grados y caminar en esa dirección durante 5 segundos. A continuación, intente mover en la dirección original.
- Parar y medir la distancia hasta el obstáculo a 30 grados a la derecha y a 30 grados a la izquierda. Entonces trate de ir en la dirección de la medida con la mayor distancia hasta el obstáculo.
- Apagado un poco, entonces ejecutar danza #1 (al azar) - este es sólo un poco más comprometido que danza de #1.
Cuando se enciende el escarabajo, es necesario calibrar el giroscopio. Tiene que ser inmóvil y sobre una superficie horizontal. Cuando el escarabajo está calibrando girocompás, parpadea una luz amarilla. Si escarabajo se mueve o se agita durante la calibración, una luz roja empieza a parpadear y se reinicia el proceso de calibración.
Si escarabajo es al revés, se detiene y reinicie el proceso de calibración. Esto también restablece la dirección que escarabajo está tratando de mantener.
Si escarabajo no se puede mover, ya sea debido a algún obstáculo grave o pilas gastadas, las tres luces parpadeará con un ligero retraso relativo (luces).
Para los usuarios móviles: el "video promocional" de este proyecto es en YouTube aquí.













 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")