Paso 4: piernas
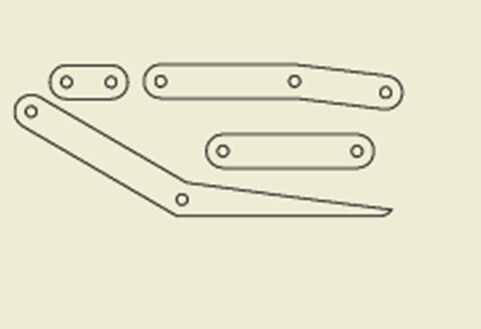

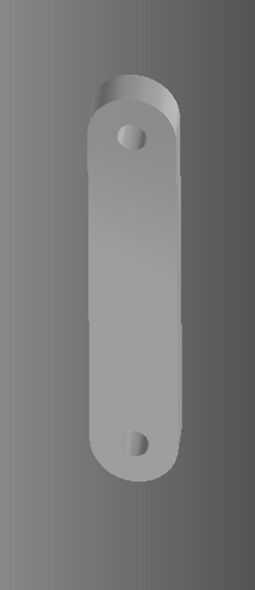
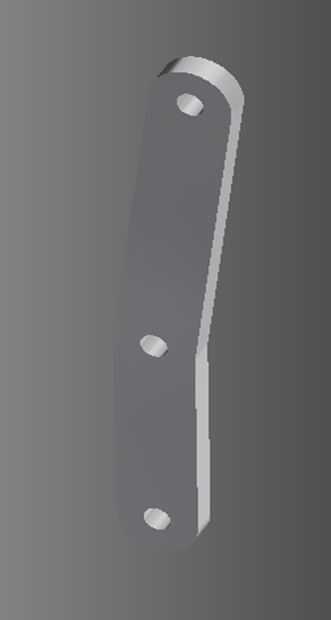
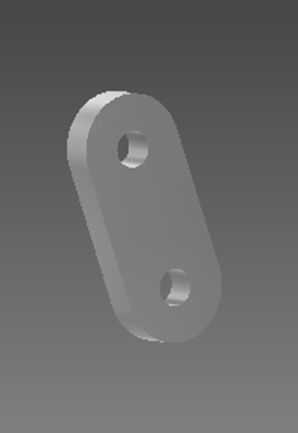

No quiero que un proyecto que caminaba en 8 patas. Quería que el movimiento de las piernas para ver realmente como la de una araña y lo había modelado mi diseño después una araña caminando simulación. Este método tenía dos piernas andando fuera de fase entre sí exactamente la mitad de un ciclo, por lo que he traducido este momento mecánico haciendo mi diseño de 4 piezas, sustitución de cada articulación en un tramo de arañas con un pivote, había rediseñado para que los puntos fijos durante el movimiento fueron montados en un marco y luego subieron con un método de accionar el movimiento de caminar. Cada pata tenía 4 piezas que por lo tanto 32 componentes individuales tuvieron que ser hechas (en la foto)
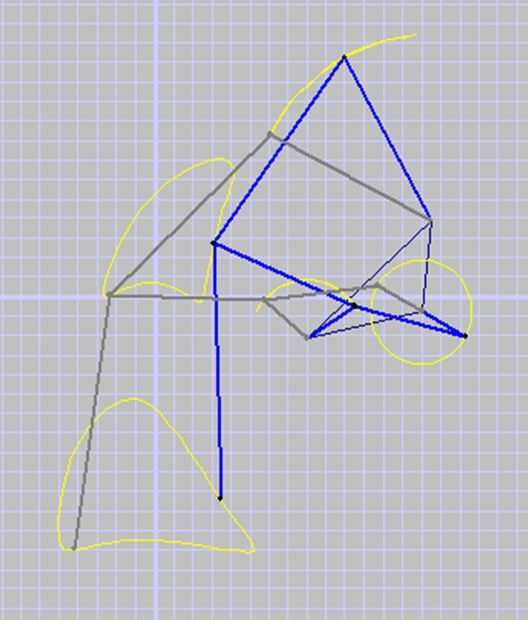
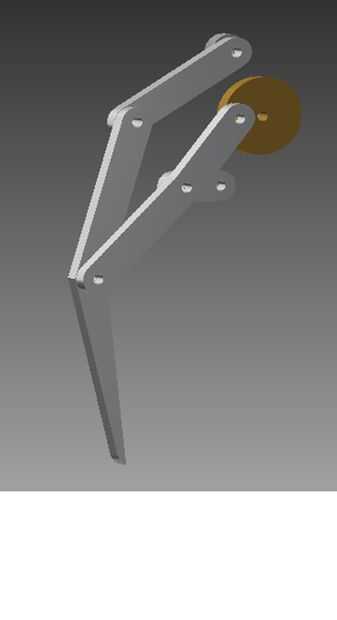
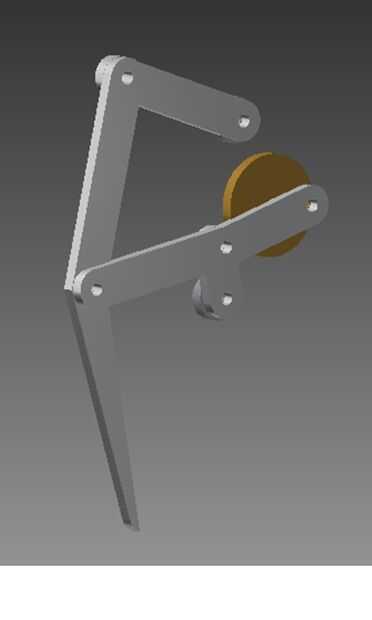
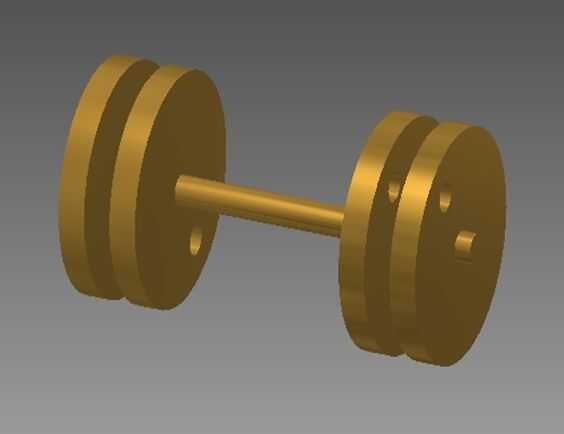
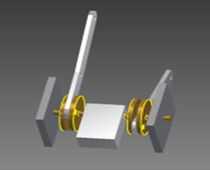
Para poder que he intentado reemplazar donde en una araña un músculo sería con una rueda y fije cada pierna 180 grados del otro. Esto permitiría las piernas para caminar fuera de fase. Sin embargo esta otra cuestión que, como el círculo, gira las piernas spin e inmediatamente se atasca por el eje de que la rueda fue el. Esto se resolvió haciendo un diseño del cigüeñal (en la foto) que permitió la rotación de 360 grados de ambas piernas.
Una vez que este diseño del cigüeñal trabajado en inventor de Autodesk que establece que todos los componentes de la pierna con la mano.
Luego inició la construcción de los 32 de las piezas individuales de la pierna. Mientras yo sabía que me iba a cortar estas fuera de una hoja de aluminio de 3 mm era seguro del método. Una primera que entretuvo la idea de utilizar un cortador de plasma para cortar rápidamente hacia fuera sin embargo nunca había usado uno antes y no quiero riesgo de dañar la integridad de las piernas. En cambio lo que hice fue esto. Imprimí de formas de relación de 1:1 tamaño real de todas las piezas de la pierna y luego los pegan a la hoja de aluminio con un palillo de pegamento común en grupos de componentes similares. Después de más o menos cortar estas piezas individuales con una sierra de arco (una tarea agotadora ya que eran 32 de ellos) luego taladrar todos los agujeros. Este encolado no sería necesario si tuvieras un láser automatizado capaz de grabado.
Ahora para el poco inteligente. Atornillados los ocho de todos los componentes juntos en pilas a través de sus orificios y los puso en el molino juntos. Usé esto para cuidadosamente quitar aluminio sobrante de los bordes fácilmente debido a la naturaleza de la máquina. Todo lo que quedó después de completar este paso fue presentar y lijado de todas las piezas de la pierna para quitar cualquier fresas objetos punzantes producidos durante este proceso y dándoles un brillo atractivo. (Aunque no estoy todavía seguro si este brillo es el papel de lija o del sudor de sangre y lágrimas que derramó durante este paso)



")





 (impresión 3D)")



