Paso 3: Girar el mecanismo


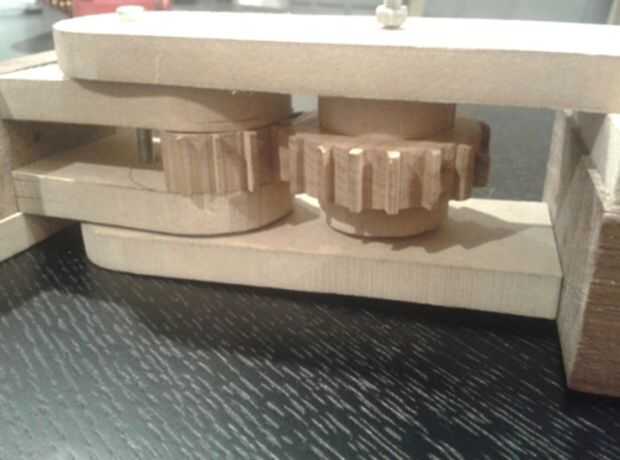




Construí un modelo 3D de madera para mi diseño inicial (obviamente mi producto final sería no hacer de la madera, aunque ahora pensando en boyante arañas son aún más aterradoras). Trabajó por la Unión de dos lados de un marco de mecanismo de giro de una varilla a través de dos puntos de pivote. Uno de estos puntos de pivote estaba en el centro exacto de una sola pieza y el otro en el borde del radio de la mitad cog (ver imágenes). Cuando el lado medio cog fue girado luego de que los dientes de malla e interactuaba que causó el lado adyacente a moverse en la dirección opuesta, similar a un mecanismo de giro universal. Sin embargo después de varias pruebas con este diseño y construcción de un modelo 3D en el ordenador he encontrado que este mecanismo está constantemente jamming o suelta. Esto es debido a que cuando gira el lado corto no hay nada que deje de mantener a ir, hasta que se separe finalmente de la corona individual, perdiendo todos los movimientos de marcha con ella hasta que se mueve en la dirección opuesta.
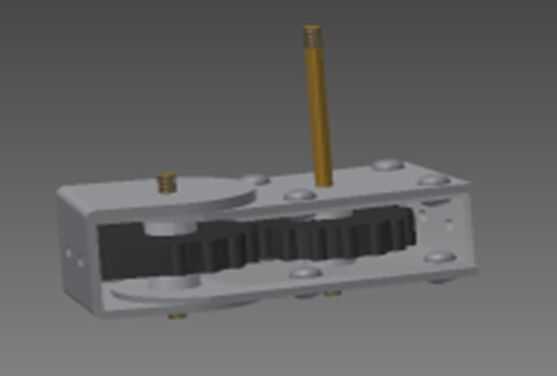
Usando lo que he encontrado desde mi concepto inicial se convirtió en él y subió con una idea nueva. Se presentó un punto de giro mucho más apropiado y el marco corto es en el exterior en este diseño. cuando como este (siempre y cuando todos los dientes de engranaje son proporcionalmente de tamaño y encajan bien) actuaba como un limitador del uno mismo, como cuando la estructura interna ya choca con el marco más corto durante la rotación se ve obligado a parar. Esta limitación del uno mismo significa que el diseño de este módulo funciona perfectamente tal y como anticipamos y coincide con todos los requisitos para la construcción. Por lo tanto, pareció adecuado y comenzaron la construcción. Si usted está haciendo este proyecto te recomiendo mi segunda idea más desarrollado aunque es más difícil hacer.
Primero hice dos engranajes de plástico acrílico de 20 mm y perforado un agujero de 5 mm en el centro de cada uno antes de cortar uno de los dientes por la mitad y perforar y golpear ligeramente el diente completo listo para un prisionero. Después de me rasguñó una red del mecanismo de giro en aluminio de la hoja usando un y perforar agujeros en él. Una vez hecho esto recórtela con una sierra de arco, antes de doblar en ángulo recto hasta que se terminaron las piezas del marco del mecanismo de giro. Después colocar nylon en el torno de metal, había perforado a 5mm y partió apagado en la longitud deseada para que sea utilizado como espaciadores entre la corona y en el marco. También, porque el nylon es auto lo lubricante asegura una rotación suave. Finalmente atornillada la corona la mitad en el lado pequeño del marco y asegura que los dientes fueron enclavamiento en ambos dientes antes con una varilla de latón de 5mm para unir las mitades dos marco juntos y todo pernos en su lugar. Un prisionero fue utilizado para fijar la corona grande a la varilla de latón. Prueba girando la barra grande demostró que el lado pequeño del mecanismo de giro era fuerza a moverse en respuesta. (ver imagen)



")





 (impresión 3D)")



