Paso 5: Configuración del servidor de Fadecandy en Pi
Usted tendrá que descargar algunos archivos desde GitHub. Esto significa que necesita tener la función de Git instalada en el Pi. Para confirmar esto se descarga esto escriba en el símbolo del sistema:
sudo apt-get-y instalar git
Una vez terminado, escribe esto para descargar el repositorio de Fadecandy GitHub a la Pi:
git clone git://github.com/scanlime/fadecandy
Esto descargas un archivo ejecutable que ya no funciona en la versión más reciente de Raspian y otras distribuciones por lo tanto hacen esta siguiente:
cd fadecandy/servidor
hacer submódulos
hacer
(Este tarda un poco asi que tengan paciencia) Una vez hecho esto:
sudo mv fcserver usr
Finalmente, el servidor debe ejecutarse al inicio. Esto se hace mediante el archivo /etc/rc.local que nos permite agregar programas a la lista de ejecución de inicio. Más adelante se incluirán nuestro programa python integración LED control y control de aplicaciones de TouchOSC, así. Para ello vamos a utilizar de Pi en editor de texto o archivo de comandos "nano". Sudo debe ser utilizado porque estamos editando archivos de usuario raíz. Para hacer esto, abra el símbolo del sistema y el tipo:
sudo nano /etc/rc.local
Y esto antes de la línea de "exit 0" final en el archivo. Esencialmente, los comandos antes de que este se ejecutará en el arranque una vez que ha arrancado el Pi, en el fondo:
/usr/local/bin/fcserver /usr/local/bin/fcserver.json > /var/log/fcserver.log 2 > & 1 &
A continuación necesitamos hacer el archivo de configuración .Groovy. En el símbolo del sistema, escriba:
sudo nano /usr/local/bin/fcserver.json
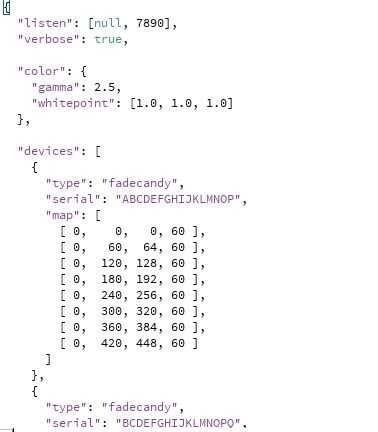
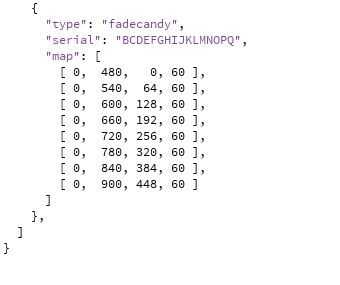
Escriba este código en el archivo JSON:
Puesto que la Fadecandy realmente es capaz de manejar hasta 64 longitud de tira, esto vuelve a asignar cada tira de 64 a 60 (porque las Neopixels son 30 o 60 por metro), establece un whitepoint de hardware en una escala de 0.1 a 1.0 (brillo por ciento como un hardware por defecto donde 1.0 es 100% brillo) y configura los números de serie para el Fadecandy. Números de serie pueden encontrarse enchufando su controlador fadecandy para la frambuesa pi a través de lo dispuesto
USB e ir a símbolo del sistema y uso de:
cola -f /var/log/fcserver.log
Esto le dará el número de serie alfabética de 16 dígitos de cada controlador individual para utilizar en donde dice serial el código. Si sólo se usa un regulador, elimine el bloque {} que tiene el segundo. Cada controlador de Fadecandy puede soportar 8 tiras de LEDs hasta 64.









")



