Paso 10: Montar/Firmware a bordo Mega 2560 y rampas 1.4
Se supone que tienes instalado el Arduino software ("Arduino IDE" de ahora en adelante) y preparó su powersource en los pasos anteriores.
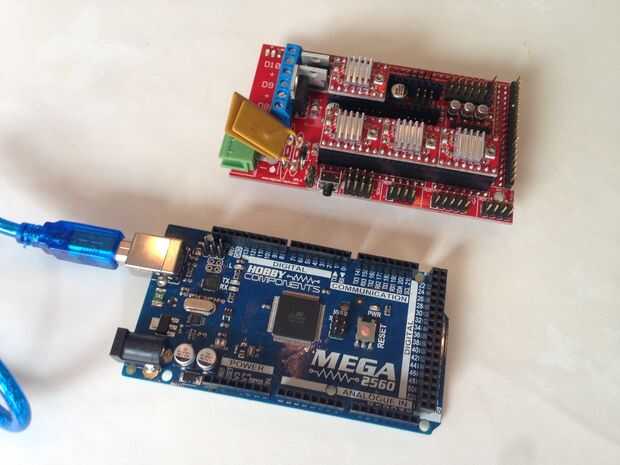
Montan Mega 2560 R3 y rampas 1.4
La Junta de Mega 2560 de desenchufe y desconecte cualquier powercords que podría tener sobre el 1.4 de rampas.
Quité las tarjetas de conductor del motor como encontré que necesitaba establecer presión bastante firme, pero incluso, en la parte superior la Junta rampas 1.4 para conectar correctamente.
Debe ser realmente cuidadoso ya que hay un montón de alfileres que todo tiene que ir hacia abajo en los enchufes hembra en las rampas 1.4 Junta. Tenía un puñado de alfileres doblados que era sensible y toda la fila superior que suavemente ser empujado hacia adentro también!
También debían acortar algunos de los pines bajo powerconnector en el 1.4 de rampas que lifte hasta tocar en el cañón de energía en el tablero de r3 Mega 2560. No importa que tocan, pero mi Consejo se levantó un montón!
En el lado positivo, es el hecho de que la Junta de rampas sólo puede ser instalado de una manera.
Después de la Asamblea:
- Inserte el powerconnector verde (12v11a/12v5amp) en rampas 1.4.
- Compruebe los cables corresponde a la entrada + y -
- Encienda la fuente de alimentación.
- Conecte el USB al ordenador.
No importa lo qué secuencia hacer 3 y 4...
ADVERTENCIAS
Inversión +- o de lo contrario no se conecta correctamente energía puede destruir tus aparatos electrónicos y causar incendio.
Insertar incorrectamente controladores paso a paso destruir tus aparatos electrónicos y causar un incendio.
Asegúrese siempre de poder y USB se desconecta al quitar o ajustar controladores paso a paso. Siempre Asegúrese de insertar los conductores en la orientación correcta y en la toma de corriente correctamente. Potenciómetro ajustable pequeño lejos del powerinput.
Los pernos de tope podrían tener un diseño diferente sobre sus topes o junta, así que asegúrese Conéctelos correctamente.
No garantizar Arduino/rampas con tornillos conductoras a través de ambos agujeros. El tornillo puede cortar el rastro positivo crear un corto corriente alta.
Descargar software
Vamos a utilizar el RepRap Marlin (no un enlace para descargar, pero en realidad un wiki con instrucciones paso a paso si se desplaza hasta "figuración y recopilación") software (es en realidad un firmware) entre muchos otros firmwares (una lista) por ahí.
Tenemos que subir el firmware a la tarjeta de Mega 2560 R3 antes de que podemos empezar tomando ventaja de nuestro Consejo de rampas 1.4. El firmware de Marlin es código que convierte la Mega 2560 r3 Junta en una impresora 3D (básicamente).
Hay una buena descripción aquí, si desea algún otro ángulo de lo que escribo.
Otra persona hizo una guía que encontré útil así.
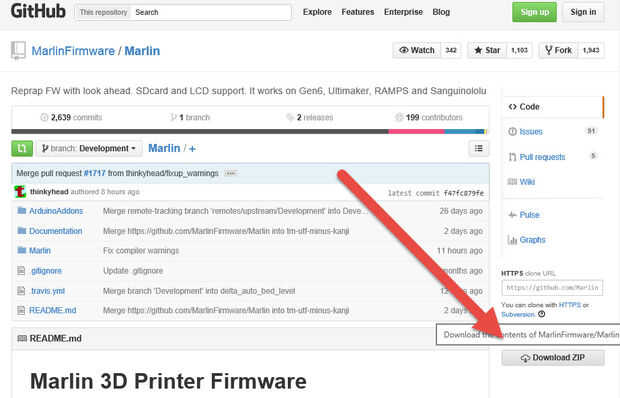
Obtener el Firmware de Marlin
Ir y descargar el Firmware de la impresora 3D de Marlin, que es la versión 1.0.2 en fecha esta escritura y colocarlo en algún lugar que lo encontrarás.
Haga clic en el Descargar Zip en el lado derecho. Vea aquí mis imágenes si no las encuentra.
El archivo descargado se llama Marlin-Development.zip que se cree una carpeta denominada desarrollo Marlin cuando lo desempaqueta. Poner un lugar conveniente como el escritorio.
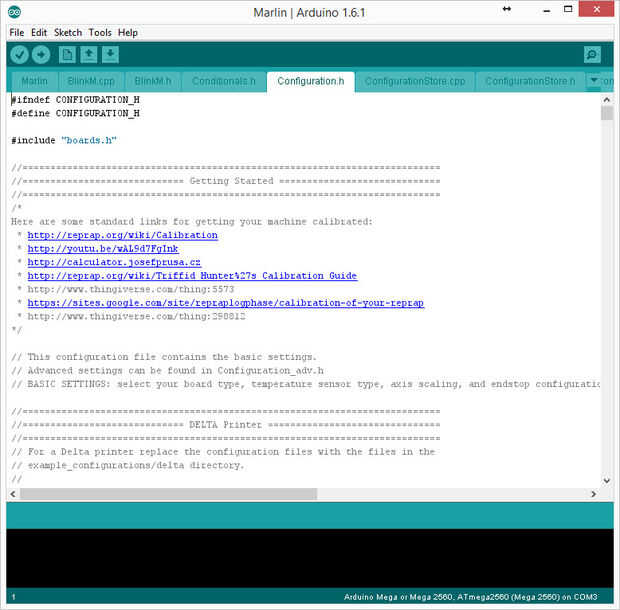
Configurar el Firmware de Marlin en Arduino programa
- Desde dentro del IDE de Arduino: archivo -> abrir
- Navegar a la carpeta de Marlin-desarrollo y en la carpeta de Marlin .
- Seleccione y abra el archivo Configuration.h o Marlin.ino (ambos abre un conjunto vinculado de bosquejos de las pestañas, por lo que no importa que uno elige).
- Una nueva ventana abre que contiene Marlin.ino. Cierre la ventana de otra edad.
- Tienes un montón de pestañas en la ventana abierta. Seleccione la ficha Configratuin.h - ver imágenes.
Definición de Motherboard, Tarjeta madre como rampas 1.4 con accesorios.
Necesitamos definir qué placa base estamos utilizando. Puedes ver todos tipos de tabla disponibles en el archivo boards.h .
Muchas guías en la web nos cuentan a cualquiera editar en tableros. o pernos o similares, para definir la placa base. No tenemos que hacerlo ya. Las variables que necesitamos se colocan en Configuration.h
- Configuration.h -> Presione CTRL + F para abrir la ventana Buscar, escriba y rampas
- Haga clic en Buscar para encontrar la línea que contiene: #define Motherboard, Tarjeta madre...
- Aquí tenemos que definir nuestro Consejo como PR. definiciones en el archivo boards.h . Aparte de definición estamos usando una tabla de rampas, es el de los dispositivos conectados a la D8 (calor-cama), D9 (ventilador) y D10 (calentador) definimos aquí. E es para extrusora, F para el ventilador, B para cama.
- Asegúrese de que la línea lee: #define Motherboard, Tarjeta madre BOARD_RAMPS_13_EFB
- Decir tuvimos dos ventiladores y no heatbed definir la última parte un EFF en su lugar.
- Guarde el archivo si ha realizado cambios.
Definición de velocidad en baudios, extrusoras y fuente de alimentación
Velocidad en baudios predeterminada es 250000 ahora. Si te da problemas (con ordenador) usted puede cambiar a 125000.
Estos pasos son sólo para personas que necesitan cambiar a la configuración de 125000 no predeterminada.
- Abierta Configuration.h
- Encontrar la línea que contiene #define BAUDRATE 250000 y poner dos barras delante de él, como este:
#define BAUDRATE 250000 - En una nueva línea que escribir:
#define BAUDRATE 125000 - Guarde el archivo
Extrusoras por defecto definido como 1, así deje.
Fuente de alimentación se configura como el estándar ATX. Fuente de alimentación puede definirse así como X-Box.
Definir configuración térmica
Sensores de temperatura
Hay una lista con 20-25 diferentes opciones para cada sensor. Por debajo de las opciones es la lista que define nuestras entradas del sensor en el tablero de rampas 1.4.
Por defecto define SENSOR_0 con la opción 1 que significa que es un / / 1 termistor de 100 k - mejor opción para EPCOS 100 k (subida de 4,7 k) o en otras palabras: el termistor estándar utilizado para temperatura medidas para impresoras 3D (que conozco).
El TEMP_SENSOR_0 es el termistor caliente extremo.
Los otros sensores están configurados con la opción 0, que se traduce en ser desactivado.
#define TEMP_SENSOR_0 1
#define TEMP_SENSOR_1 0
#define TEMP_SENSOR_2 0
#define TEMP_SENSOR_3 0
#define TEMP_SENSOR_BED 1
Configuración del calentador
Necesitamos definir la temperatura mínima y máxima de nuestro extremo caliente y cama caliente
Temperatura mínima
En primer lugar es la configuración mínima, que son por defecto a 5, que es sólo para probar el termistor está trabajando. Es decir: para asegurarse de que los cables no fundidos o dañados etc..
Comentario 1, 2 y 3 como no los tenemos.
Obtendrá un error de compilación si comente el BED_MINTEMP (tal vez sólo si permitía bajo sensores de temperatura). Puede definir MINTEMP como 0.
#define HEATER_0_MINTEMP 5
#define HEATER_1_MINTEMP 5
#define HEATER_2_MINTEMP 5
#define HEATER_3_MINTEMP 5
#define BED_MINTEMP 5
Temperatura máxima
Aquí definimos la temperatura máxima para nuestro final caliente y cama caliente.
Valores predeterminados:
Caliente-final: 275
Cama caliente: 150
Comentario 1, 2 y 3 ya que no tenemos los (no estoy seguro que usted debe realmente)
Si imprime ABS, quiere hacer unos 230 grados o menos.
Quitar el / / en la línea con BED_MAXTEMP si se instala una cama caliente.
#define HEATER_0_MAXTEMP 240
#define HEATER_1_MAXTEMP 275
#define HEATER_2_MAXTEMP 275
#define HEATER_3_MAXTEMP 275
#define BED_MAXTEMP 120
Si usted hace cualquier cambios más grandes, se debe cambiar las constantes de precalentamiento manera más abajo en el archivo donde (Utilice CTRL + F) precalentamiento para PLA cotiza en 180 para hotend y 70 por cama y ABS es 240/110 respectivamente.
Constantes de precalentamiento
Éstos son sobre todo pertinentes si una pantalla de LCD, como estos ajustes se mostrará como "Precalentamiento PLA" y "Precalentamiento ABS" allí.
Es una buena idea para insertar un comentario con las temperaturas originales así que no los olvidamos.
#define PLA_PREHEAT_HOTEND_TEMP 180
#define PLA_PREHEAT_HPB_TEMP 70
#define PLA_PREHEAT_FAN_SPEED 255 / / insertar valor entre 0 y 255
#define ABS_PREHEAT_HOTEND_TEMP 240
#define ABS_PREHEAT_HPB_TEMP 110
#define ABS_PREHEAT_FAN_SPEED 255 / / insertar valor entre 0 y 255
Configuración de la extrusora
Por defecto la extrusora está configurada para no arranca a menos que el extremo caliente al menos 170 grados c. Esta función está activada por defecto con PREVENT_DANGEROUS_EXTRUDE y una temperatura mínima de la definened por defecto en c 170.
He sin comentar estas líneas, quiero probar primero el motor de la extrusora sin asociar el extremo caliente.
Recuerde retirar las barras más tarde.
#define PREVENT_DANGEROUS_EXTRUDE
#define EXTRUDE_MINTEMP 170
Definición de topes
Finales de carrera son pequeños contactos/interruptores en uno o ambos extremos del eje para indicar al sistema que debe dejar. Esto pueden utilizarse para calibrar automáticamente la impresora para el hogar y posiciones finales.
Algunas de las partes técnicas electrónicas de finales de carrera son ya definida como las distintas configuraciones de resistencia PULLUPS. Usted puede leer sobre resistencias pull up en el wiki.
Yo no soy todo en los detalles así que me voy más ajustes a por defecto por ahora.
Una cosa de importancia aunque: hay enderezamiento en la placa Arduino, que se puede utilizar, por lo que no tienes que soldar nada en ti mismo.
Si no instalan topes, necesita quitar las barras frente a una o dos líneas según su sistema. Quité ambos como no tengo ningún topes.
#define DISABLE_MAX_ENDSTOPS
#define DISABLE_MIN_ENDSTOPS
También se puede definir de que manera la impresora debe moverse para llegar a casa posision. Leer en las siguientes direcciones de movimiento de eje .
Direcciones de movimiento de eje
No hay ninguna forma real de saber que las camas van a mover, salvo que pruebe. Después de conectar todo puede mover camas alle a la posición central y uno de ellos mueva un poco. Si se mueve al revés, puede cambiar las alternativas o cambiar los pares de cables en el 1.4 de rampas - después de usted ha alimentado todo apagado y desconectado el USB también.
Si desea cambiar el archivo de configuraciones, cambias de false a true como se adapta el sistema:
/ / Invertir el sentido de paso a paso. Cambiar (o revertir el conector del motor) si un eje va al revés.
#define falso INVERT_X_DIR
#define falso INVERT_Y_DIR
#define falso INVERT_Z_DIR
#define INVERT_E0_DIR falso
Después de su haber configurado los motores para mover la manera correcta, debe configurar de que manera los motores tienen que mover llegar a la posición:
/ Sistemas dirección de topes cuando autoguiado hacia el blanco; 1 = MÁXIMO, -1 = MIN
Si un tope está configurado para estar en la posición 0 para ese eje, la configuración aquí debe ser -1. De lo contrario, debe ser 1.
#define X_HOME_DIR -1
#define Y_HOME_DIR -1
#define Z_HOME_DIR -1
¿No creo que realmente necesita cambiar esto?
Área de impresión de impresora
Define cómo es grande un área podemos imprimir en. Está catalogado como 200 milímetros en cada dirección por defecto, que es algo mucho más que nuestra impresora puede hacer. Nuestra máquina puede hacer alrededor de 40mm en cada dirección. Voy ponerlo en 37, al comenzar a una distancia segura.
/ Límites del recorrido después de autoguiado hacia el blanco (las unidades son en mm)
#define X_MIN_POS 0
#define Y_MIN_POS 0
#define Z_MIN_POS 0
#define X_MAX_POS 37
#define Y_MAX_POS 37
#define Z_MAX_POS 37
También puede definir cama de nivelación pero tienes que jugar con eso en su propia impresora para hacer sentido de ella.
Si utiliza una unidad de disquete para el eje Z es alrededor de 15mm o menos.
Configuración de movimiento
Necesitamos definir cuántos pasos las necesidades de los motores para mover las camas 1 mm.
Necesitamos usar los valores calculados para los ejes de impresora diferente y extrusora. El orden es {X, Y, Z, E}
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,4000,500}
#define DEFAULT_AXIS_STEPS_PER_UNIT {215.12,215.12,8034.69,196.52}
Definimos la mm/s más rápido que la impresora está permitida moverse. .
#define DEFAULT_MAX_FEEDRATE {300, 300, 5, 25}
#define DEFAULT_MAX_FEEDRATE {100, 100, 2, 25}
Tenemos que ajustar esto. La lista es la configuración predeterminada.
#define DEFAULT_MAX_ACCELERATION {3000,3000,100,10000}
#define DEFAULT_MAX_ACCELERATION {200,200,50,5000}
Tenemos que definir a qué velocidad está permitido nuestra impresora acelere. El valor predeterminado para los 3 son 3000, pero cambio de que a 100 a la puesta en marcha fácil.
#define DEFAULT_ACCELERATION 100
#define DEFAULT_RETRACT_ACCELERATION 100
#define DEFAULT_TRAVEL_ACCELERATION 100
Subir el firmware a la impresora
Presione la "garrapata" (si esa es la palabra) icono a la izquierda del icono de flecha para verificar el código. Si comete un error que debe encontrarlo y corregirlo. Es más probable que un error o tal vez un extra \ o similar.
Si da un error pero no aparece nada, puedes copiarlo y pegarlo en el Bloc de notas o similar, para ver cuál es el error.
Usted puede presionar el icono de flecha para cargar la configuración en su impresora.
Un error común que he hecho es estar conectado a mi impresora con Pronterface (u otro programa de controlador USB) como Arduino no se puede conectar a él en ese caso.
")





")



