Paso 2: Alambre de todo!
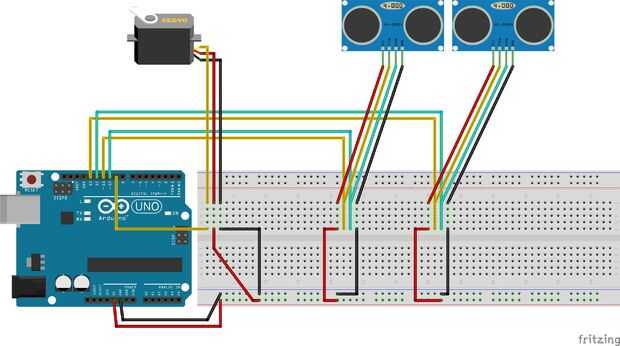
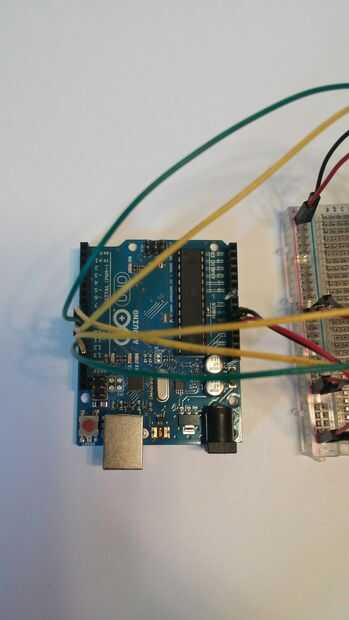
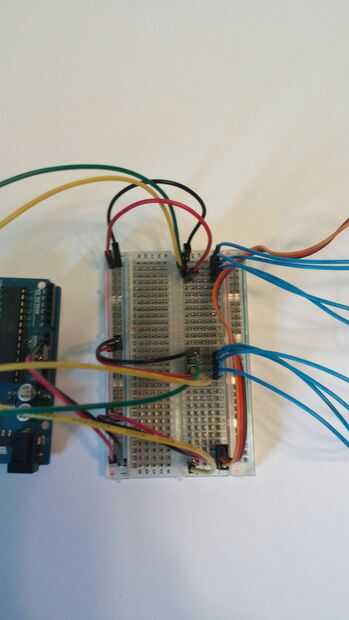
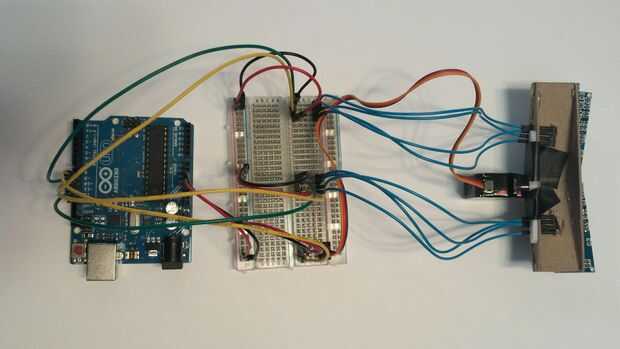
Ahora todo lo que necesitas hacer es conectar todo! Usé Fritzing para crear un diagrama de circuito. También he proporcionado algunas fotos del producto final.
El código utiliza pernos digitales de 9 a 13. 9 el PIN es el pin de datos para el servo. Pines 10 y 11 son el eco y trig pins, respectivamente, del sensor de la izquierda. Los pines 12 y 13 son el eco y trig pins, respectivamente, del sensor adecuado. He conectado los pines de 5v y gnd del Arduino a la placa y luego utiliza puentes para conectar los servos y sensores.













")