Paso 1: Construir el montaje del Sensor





En primer lugar, necesitamos construir el soporte del sensor. Para ello construyó un prototipo de cartón y luego construyó mi proyecto final en el tablero de partícula. En el futuro planeo 3d impresión un perfecto soporte para el sensor.
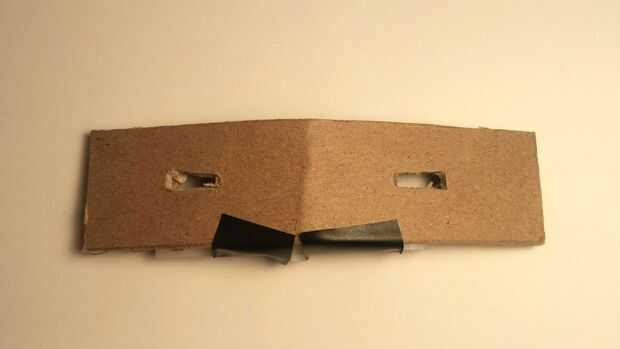
Cortar un rectángulo que es aproximadamente la misma altura que uno de los sensores y 1/8 pulgada (unos 3mm) más larga que dos de ellos juntos. Apartar el rectángulo y cortar dos triángulos isósceles idénticos con el ángulo extraño hacia fuera siendo de 120 grados. Lo corté en 120 grados debido a que los sensores de la gama tienen un cono de 15 grados que miden, esto permite no hay puntos ciegos y optimizar el área de que se detecte.
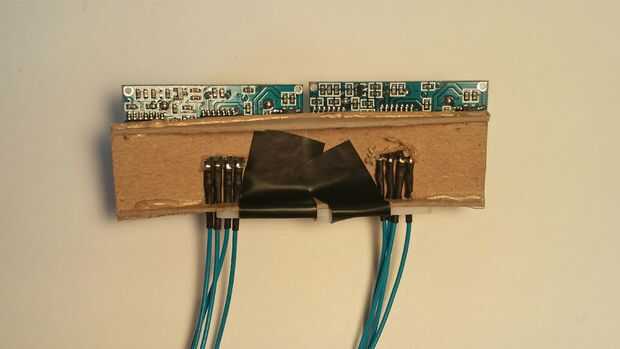
Finalmente, coloque los sensores en el Monte para determinar dónde se corte los orificios rectangulares para que puedan caber en. Hacer el agujero tan pequeño como sea posible porque este ajuste compensa no utilizar cualquier otro tipo de adhesivos o conectores. Ahora corte otro pequeño agujero rectangular en el triángulo de la parte inferior de la montura para permitir jumper cables pasen a través. Una vez que se enchufan los cables de puente, los sensores deben permanecer en el lugar. Si no, usted necesitará fijar con algún pegamento o alfileres.
Cuando termines con el Monte, instale el servo.













")