Paso 2: Alambre el FTDI USB cable


Hay una conexión más física que necesitamos hacer.
Agarra su nuevo cable USB FTDI y centrarse en el conector negro enfrente del conector USB. Usted verá algunos enchufes de clavijas hembra y algunos hilos de color detrás de estos conectores. Sólo tenemos que hacer dos conexiones. Búscate algunos cables puente macho/macho, si no tienes algunos.
Observe los cables naranja y amarillo del cable USB FTDI. Conecte un puente de alambre en las tomas naranja y amarillas en el cable USB FTDI.
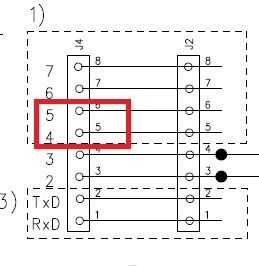
Ahora la parte difícil. Tienes que cambiar el transmitir y recibir los cables entre el conector y los pasadores de cabecera en su tabla de controlador/sensor motor. Es que el pin de recepción en el tablero de controlador/sensor motor va al pin de transmisión en el conector USB. Y el ping de transmisión en el tablero de controlador/sensor motor va al pin de recepción en el conector USB. Para que sea fácil, el cable naranja va al pin 4 y el cable amarillo va al pin 5.







")





