Paso 2: La soldadura de las conexiones

La Junta de arranque
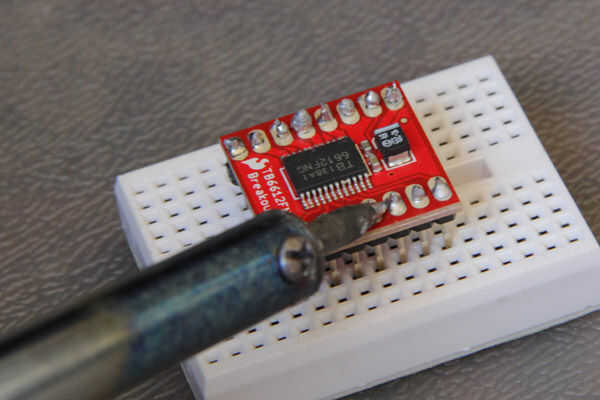
El breakout TB6612FNG viene sin pins - así que necesitarás soldar su propio.
Coloque 2 conjuntos de 8 terminales de cabecera de la tira con unos alicates para que consiga una ruptura en el eje derecho. Coloque los pasadores de encabezado en un protoboard y luego breakout junta a ello - Esto asegurará el correcto espaciado y ángulo de 90 grados entre la Junta y los pernos de la cabecera. También he usado plastilina para fijar pernos (no derretir la plastilina, simplemente va crujiente y se puede seleccionar). A ver de mi trabajo de soldadura de menos que fino que todavía estoy recibiendo a los apretones con mi soldador!
Conexiones de la batería - la batería del Motor
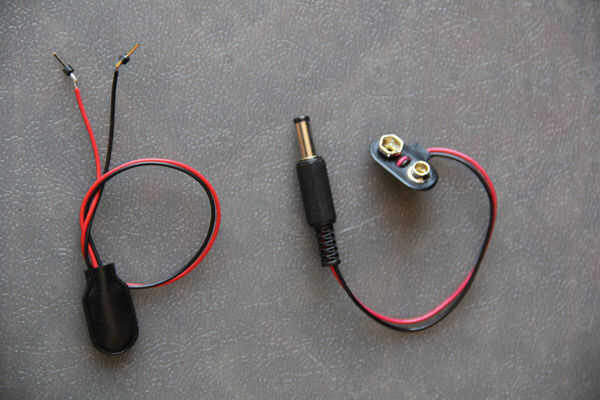
El motor funciona una fuente de 6V separado. Dependiendo del tipo de conector que tiene para el soporte de la batería, puede necesitar soldar pernos de rúbrica en las puntas - la potencia del motor se conectará a la protoboard. (Breakout Junta tiene condensadores a bordo para aislar el ruido del motor, así que no hay necesidad de agregar estos usted mismo)
Conexiones de la batería - la batería de Arduino
Arduino se funcionan con una batería de 9V, por lo que no necesita ser atado al cable USB. Dependiendo del conector/soporte que tienes deberá soldar un conector de barril de 2,1 mm en las puntas (Asegúrese de que la patilla central se suelda al cable positivo). También puede comprar un soporte con un conector ya.
Terminales del motor
Por último, soldar los cables a los bornes de los motores. I utilizan cables puente, había despojado de uno de los extremos y soldar en el motor. Esa manera, tienes las clavijas para conectar el motor a la placa.
Imágenes:
1. soldadura de la placa breakout (puede decir todavía estoy aprendiendo ¡)
2. conectores batería soldados
3. el motor terminales soldadas y motores montados













